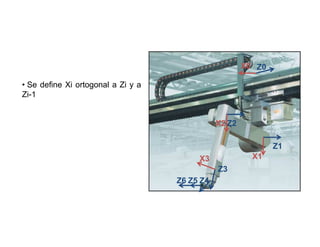
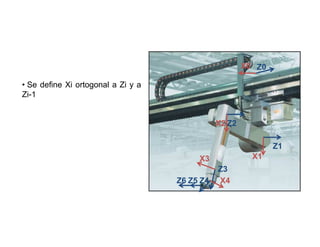
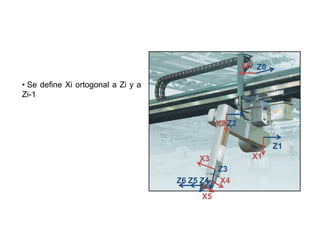
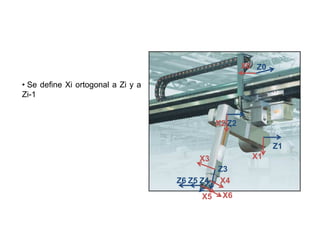
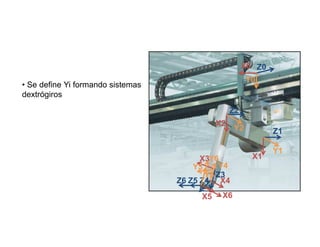
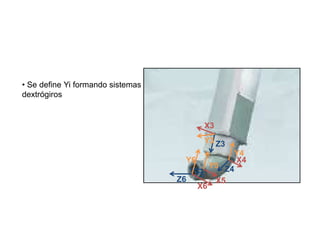
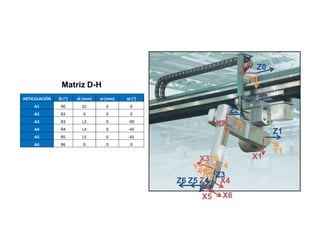
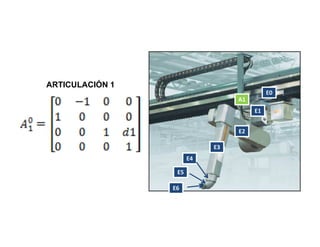
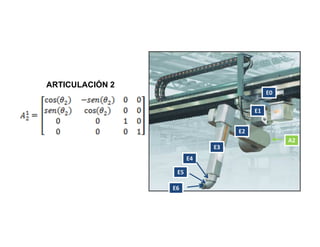
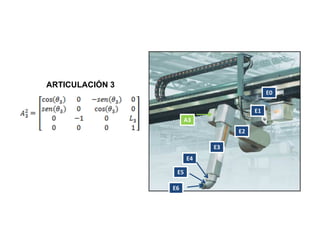
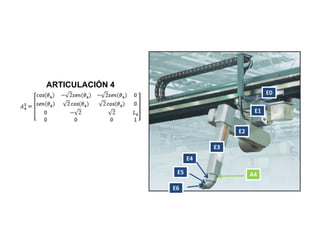
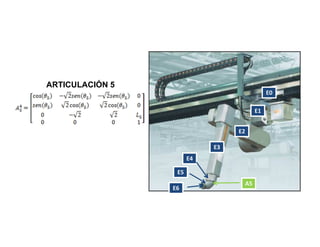
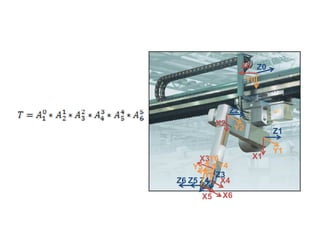
Este documento describe cómo aplicar el algoritmo de Denavit-Hartenberg para modelar cinemáticamente un robot industrial Fanuc P200T de 6 grados de libertad. Se identifican los eslabones y articulaciones del robot, se definen los ejes de movimiento y se asigna un sistema de coordenadas a cada eslabón utilizando las convenciones de Denavit-Hartenberg para obtener la matriz de transformación que representa la cinemática del robot.