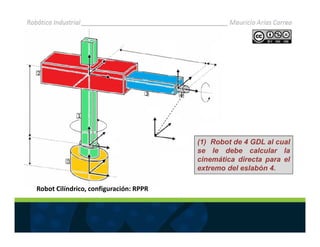
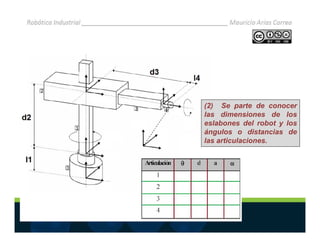
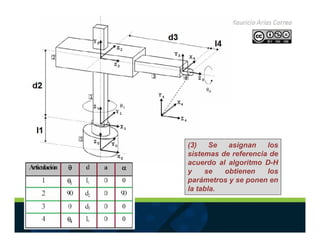
El documento describe los pasos para calcular la cinemática directa de un robot industrial de 4 grados de libertad utilizando el método Denavit-Hartenberg. Primero se especifican las dimensiones del robot y ángulos de las articulaciones. Luego, se asignan sistemas de coordenadas siguiendo el algoritmo D-H y se calculan los parámetros en una tabla. Finalmente, se multiplican las matrices de transformación para obtener la matriz T, que resuelve el problema de cinemática directa.