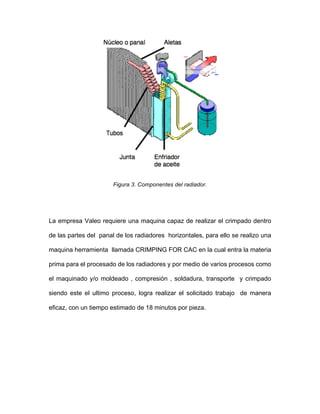
El documento describe un proyecto de desarrollo de una máquina de crimpado para una empresa automotriz. El proyecto fue realizado por el Centro de Ingeniería y Desarrollo Industrial (CIDESI) y tomó 16 meses en completarse. La memoria describe el diseño eléctrico y mecánico actualizado de la máquina, así como la metodología Grafcet utilizada para la programación automática de la misma.















































































![Formato final agosto_2011[1]final](https://cdn.slidesharecdn.com/ss_thumbnails/formatofinalagosto20111final-110817185500-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

















