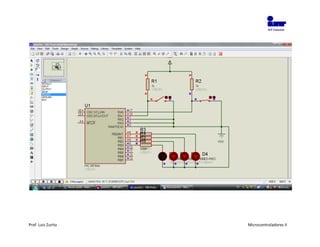
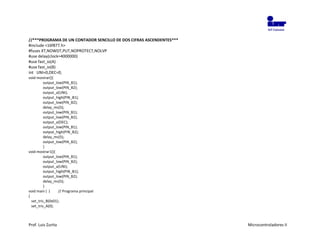
Este programa implementa un contador de dos dígitos ascendente en los displays multiplexados de un microcontrolador PIC. Muestra los valores del contador en los displays y los incrementa cada vez que se presiona un botón. Evalua si ha alcanzado el límite máximo para reiniciar el contador.