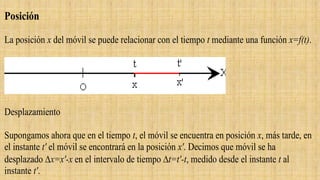
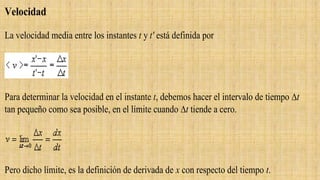
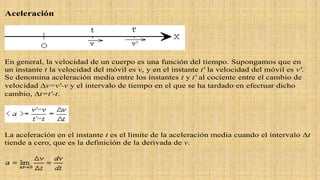
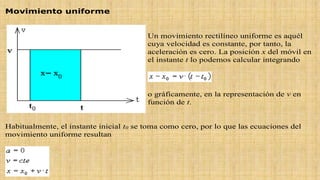
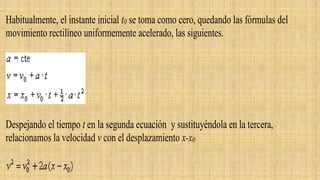
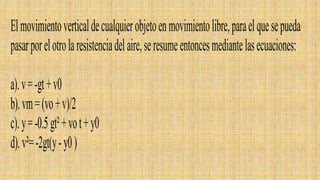
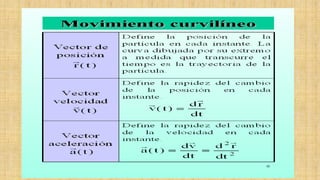
Este documento presenta conceptos básicos de dinámica y cinemática. Explica el estudio del movimiento de objetos y las relaciones con fuerza y masa. También define vectores de posición, movimiento rectilíneo, velocidad, aceleración, movimiento uniforme y uniformemente variado.