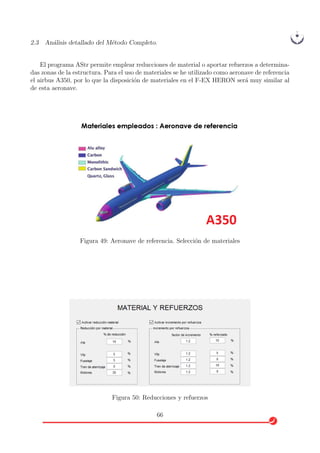
Este documento presenta el diseño conceptual de un avión de combate de incendios llamado F-EX Heron. Comienza describiendo los requisitos de diseño y realizando un tamaño preliminar mediante cálculos iterativos de fracción de peso en vacío y combustible. Luego analiza las misiones contra incendios y de ferry a través de diagramas potencia-peso y carga alar. Finalmente, dimensiona preliminarmente la geometría, incluyendo el fuselaje, ala y cola.






























![2.2 DIAGRAMAS POTENCIA-PESO Y CARGA ALAR
Despegue Subida Crucero M´ax. Prop Giro Stall
1524 6096 6096 0.5 10000 2.3
0.05 1.016 0.48 0 0.5 46.296
0.05 0.073 0.073 0 0.073 0
2.3 0.0576 0.0576 0 0.0576 0
1524 0 0 0 0 0
Tabla 6: Tabla de datos, por tramos, en ferry. S´ımil B2
Una vez analizadas las dos misiones se comprueba que la misi´on contra incendios es m´as
restrictiva que la misi´on de ferry. Por ello se van a obtener valores de la superfie y la potencia
tomando como referencia el caso m´as cr´ıtico.
2.2.3. An´alisis de resultados
S´ımil H´ercules
A continuaci´on se plasman los valores de superficie de referencia y potencia a nivel del mar,
obtenidos con el ratio L/D, fracciones de pesos y pesos correspondientes al avi´on convencional.
WT O
Sref
= 2800 N/m2
o, dividiendo por g, WT O
Sref
= 286 kg/m2
Sref = 131,6m2
los resultados relativos a la potencia son:
PSL ∈ [14495,817, 45903,42]kW = [19439,21, 61557,5] shp
Se toma como potencia a nivel del mar un valor m´as peque˜no cercano al m´ınimo, pero
d´andole margen por si la l´ınea de crucero se desplaza hacia arriba:
PSL
WT 0
= 35 m/s
PSL = 17001,96kW = 22800 shp
32](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-32-320.jpg)
![2 REQUISITOS DE DISE ˜NO
S´ımil B2
En este caso, al igual que en el anterior, a partir del ratio L/D se obtienen los siguientes
valores de superficie de referencia y de potencia al nivel del mar.
WT O
Sref
= 2800 N/m2
o, dividiendo por g, WT O
Sref
= 286 kg/m2
Sref = 166,86m2
los resultados relativos a la potencia son:
PSL ∈ [14002,396, 44340,923]kW = [18777,52, 59462,16] shp
Se elige como potencia a nivel del mar un valor cercano al m´ınimo, dejando cierto margen
por si la l´ınea de crucero se desplaza hacia arriba:
PSL
WT 0
= 35 m/s
PSL = 17001,96kW = 22800 shp
2.3. DIMENSIONADO PRELIMINAR DE LA GEOMETR´IA Y
DE LAS SUPERFICIES DE CONTROL
2.3.1. Fuselaje
Las dimensiones del fuselaje dependen de las necesidades de cada avi´on y de sus expectativas,
para una primera aproximaci´on, se recurre a tablas estad´ısticas:
Figura 24: Tabla coef. a y C
33](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-33-320.jpg)

![2 REQUISITOS DE DISE ˜NO
2.3.3. Coeficiente de volumen de cola
La efectividad de la cola para generar un par sobre el centro de gravedad del avi´on es propor-
cional al ´area de la cola y el brazo del momento. La principal funci´on de la cola es contrarrestar
el par generado por el ala, por lo que suele haber relaci´on directa entre las dimensiones de una
y otra.
En este apartado no se pretende un dimensionado final de las superficies de control, sino
una primera aproximaci´on del brazo del momento y del ´area de las superficies. Conforme se
vaya desarrollando el proyecto se ir´an afinando estos c´alculos.
Se partir´a de la expresi´on de los Coeficientes del Volumen de la Cola:
CVt =
LVt SVt
bwSref
(2.20)
CHt =
LHt SHt
bwSref
(2.21)
Los valores de estos coeficientes se obtendr´an de una tabla con los valores t´ıpicos, conside-
rando los mismos casos que para la estimaci´on de la longitud del fuselaje: un avi´on militar de
carga y la media entre el avi´on militar de carga y un Twin Turboprop.
Para poder determinar el tama˜no de las colas hay que estimar tambi´en el brazo de cola LVt
y LHt , que en este proceso inicial se considerar´an como un porcentaje de las dimensiones del
fuselaje LVt LHt .
Adem´as se tendr´an en cuenta las siguientes hip´otesis:
• Avi´on con motor en las alas: LHt ∼ [50 − 55] % de la distancia del fuselaje.
• Si la cola es en H (o en T), se puede reducir LHt ∼ 5 % el tama˜no tanto de la cola vertical
como de la horizontal.
Tenemos por tanto:
Lfuselaje = aWc
0 (2.22)
SV t =
CV tbwSref
LV t
(2.23)
SHt =
CHtˆcwSref
LHt
(2.24)
35](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-35-320.jpg)




































![4 CURVA V-N
Figura 61: Curva v-n 10.000 y peso antes de la descarga
Como se puede observar, en los tres casos de estudio las rachas de viento se encuentran
dentro de la zona segura de la envolvente de vuelo. El caso m´as limitante es aquel en el que
el peso es el existente antes de realizar el descenso para la descarga a una altitud de 10.000ft.
En ese caso, tercera figura, podemos observar que las rachas de viento limitan en con la zona
verde para la velocidad de crucero. Esto es debido a la disminuci´on de peso de la aeronave por
el consumo de combustible.
En base a estas curvas se puede asegurar que las rachas de viento no ser´an limitantes en
ning´un punto de operaci´on de la aeronave.
El proceso de c´alculo de la curva v-n se encuentra desarrollado en un fichero .m, donde se
han introducido las ecuaciones necesarias para que la curva cumpla con la FAR 25. Adem´as,
se incluye una tabla para comparar los distintos valores de las velocidades en cada uno de los
casos:
VELOCIDAD [f t/s] CURVA 1 CURVA 2 CURVA 3
Vs1 77.1758 89.7912 27.7991
Vb 81.72 94.65 32.46
Vs1neg 106.9879 124.4764 38.5376
Va 122.6404 142.6875 44.1757
Vc 588.2597 588.2597 182.1237
Vd 735.3246 735.3246 227.6546
Tabla 14: Velocidades en las distintas curvas V-N
75](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-75-320.jpg)
![5. C´alculo de los esfuerzos:
5.1. C´alculo de esfuerzos sobre el semiala derecha:
Para calculas los esfuerzos cortantes, flectores y torsores generados en el semiala derecha,
primero se ha realizado una subdivisi´on del semiala en 10, cada una con su propia ´area y su
punto de inicio. La distribuci´on de cuerdas es la planteada en el apartado de aerodin´amica para
el perfil de la aeronave.
Se han tomando los siguientes pesos:
MTOW = 335429,9[kg]
Wf = 5000[kg]
Wa = 3831,83[kg]
En la siguiente gr´afica se puede observar la evoluci´on de la cuerda:
Figura 62: Distribuci´on de la cuerda en el semiala derecha.
Teniendo en cuenta los pesos y la distribuci´on de cuerdas, se realizas un estudio de las cargas
sobre el ala, debido al peso estructural y el peso del combustible. En este estudio, se obtienen
los momentos flectores, las fuerzas cortantes y los momentos torsores en funci´on de la secci´on
del semiala. En las siguientes figuras se puede observar dicha evoluci´on:
76](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-76-320.jpg)















![3.1 An´alisis 2D del perfil MH 80.
Una vez decidido el perfil, se vuelve a realizar un Batch Analysis con el programa XFLR5.
El rango de Reynolds considerado en el an´alisis es Re ∈ [40, 110] · 106
, evaluados en intervalos
de 5 · 106
, y los ´angulos de ataque estudiados son α ∈ [−5o
, 15o
], vari´andose en intervalos de un
grado.
Los resultados obtenidos del an´alisis vienen representados en la siguiente imagen.
92](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-92-320.jpg)
















![8 C ´ALCULO DE LA POLAR Y LA EFICIENCIA AERODIN ´AMICA.
Cflam
=
1,328
√
Re
= 0,000435 (8.2)
Del an´alisis en XFLR5 se obtuvo que la capa l´ımite pasaba de laminar a turbulenta en
torno al 22.5 % de la cuerda sobre el extrad´os. Sin embargo, mediante el uso de tecnolog´ıas
de adherencia de la capa l´ımite, como puede ser la sharkskin usada en trajes de buzo,
y que actualmente se est´a investigando su aplicaci´on a la ingenier´ıa aeron´autica, se ha
conseguido aumentar la distancia recorrida por la capa l´ımite al 35 % de la cuerda media.
Cfturb
=
0,455
(log Re)2,58(1 + 0,144M2)0,65
= 0,003 (8.3)
Cfala
= 0,35Cflam
+ 0,65Cfturb
= 0,00195 (8.4)
− FF representa el factor de forma, como la geometr´ıa influye a la resistencia
FF = [1 +
0,6
(x/c)m
t
c
+ 100(
t
c
)4
][1,34M0,18
(cos Λm)0,28
] = 1,29 (8.5)
− Q representa el factor de interferencia, que fijaremos en Q = 1,05
− Swet es la superficie mojada del componente. En el caso de la superestructura Swetala
=
582 m2
Por lo tanto, CD0est
= 0,00745
Haciendo la media entre ambos m´etodos:
CD0ala
=
CD0xflr5
+ CD0est
2
= 0,006525 (8.6)
8.1.2. Resistencia de las g´ondolas y de los motores
La resistencia generada por los elementos de motopropulsivos se calcula de forma an´aloga
a lo hecho previamente para el c´alculo estad´ıstico del ala.
CD0part
=
Cf · FF · Q · Swet
Sref
(8.7)
Sin embargo, aparecen algunas diferencias entre los dos elementos:
109](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-109-320.jpg)
![8.1 C´alculo del CD0
− G´ondolas de los motores
· Dado que las g´ondolas se pueden considerar aproximadamente elipsoides, la capa
l´ımite laminar se transforma en turbulenta mucho antes que en los perfiles aero-
din´amicos que forman los pilones o el ala.
Cfgondolas
= 0,2Cflam
+ 0,8Cfturb
= 0,0022 (8.8)
· El factor de forma de las g´ondolas se calcula de la siguiente manera
FF = 1 +
0,35
2,4√4Amax
π
= 1,156 (8.9)
· El factor de interferencia de los motores se considerar´a Q = 1, dado que est´an lo
bastante alejados de la superficie del ala.
· La superficie mojada de cada motor es de Sweteng = 9,271m2
Por tanto, la resistencia parasitaria de todos los motores es de:
CD0motores
= 0,0003123
− Pilones de los motores. Los pilones de los motores se han dispuesto de forma que la
distancia entre la h´elice del motor y la superficie de la aeronave sea de al menos 0.5 m,
con la intenci´on de evitar interferencias entre ambas.
· Al estar compuestos los pilones por perfiles aerodin´amicos, en concreto NACA 0018,
se ha hecho la misma suposici´on que en el caso del ala para el c´alculo del coeficiente
de fricci´on:
Cfpilon
= 0,35Cflam
+ 0,65Cfturb
= 0,00195 (8.10)
· El FF, asimismo, tambi´en se ha calculado de la misma forma:
FF = [1 +
0,6
(x/c)m
t
c
+ 100(
t
c
)4
][1,34M0,18
(cos Λm)0,28
] = 1,58 (8.11)
· El factor de interferencia se ha considerado Q = 1,05, puesto que en este caso tanto
la g´ondola del motor como el ala causan perturbaciones sobre el pil´on.
· Por ´ultimo, la superficie mojada de los tres pilones ha sido calculada por el depar-
tamento de dise˜no: Swetpilones
= 9,98m2
La resistencia parasitaria de todos los pilones es de:
CD0pilones
= 0,0001455
110](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-110-320.jpg)
















![3 ESTABILIDAD EST ´ATICA LONGITUDINAL
32212,16kg. Se realiza a una altitud h = 15000ft, y a una velocidad v = 0,336 Mach =
108 m/s, datos que habr´a que introducir en el modelo de avi´on.
El programa necesita los vectores de fracciones de peso y posiciones del centro de gravedad,
que para este tramo ser´an:
W
W0
= [0,9852, 0,98460,9839] (3.14)
XCG
L
= [0,33, 0,33, 0,33] (3.15)
El centro de gravedad de la aeronave, XCG se mantiene constante durante todas las misiones
en la posici´on adimensional 0.496. En el modelo utilizado en ASPro, para obtener el margen
est´atico real de 15.7 %, se debe introducir un Xvirtual
CG = 0,35.
Introducciendo todos estos datos en el programa ASPro, se obtienen las gr´aficas de las
figuras 89, 90 y 91.
Figura 89: MPL: ´Angulo de ataque durante el primer crucero
Figura 90: MPL: Deflexi´on del tim´on de profundidad durante el primer crucero
127](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-127-320.jpg)
![3.4 Trimado longitudinal
Figura 91: MPL: Resistencia de trimado durante el primer crucero
´Angulo de ataque (α) Tim´on de Profundidad (δe)
Deflexi´on Max. 3.23 -7.34
Deflexi´on Min. 3.215 7.37
Tabla 23: MPL: Deflexiones m´aximas y m´ınimas durante el primer crucero
2. Descarga de la carga de pago.
La descarga del retardante se hace a 300 ft y 77m/s = 0,227 Mach. Las fracciones de peso:
W
W0
= [0,9839, 0,3493] (3.16)
XCG
L
= [0,33, 0,35] (3.17)
128](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-128-320.jpg)

![3.4 Trimado longitudinal
´Angulo de ataque (α) Tim´on de Profundidad (δe)
Deflexi´on Max. 5.58 5
Deflexi´on Min. -2 -12.7
Tabla 24: MPL: Deflexiones m´aximas y m´ınimas durante la descarga
3. Segundo crucero.
De forma an´aloga al primer crucero, pero empezando justo en el momento posterior a la
descarga y acabando al final del tramo de crucero. Se realiza a una altitud h = 15000ft, y a una
velocidad v = 0,336 Mach = 108 m/s, datos que de nuevo habr´a que introducir en el modelo
de avi´on.
Para el segundo crucero, las fracciones de peso y posiciones del centro de gravedad ser´an:
W
W0
= [0,3493, 0,3473, 0,3415] (3.18)
XCG
L
= [0,496, 0,496, 0,496] (3.19)
Introducciendo todos estos datos en el programa ASPro, se obtienen las gr´aficas de las
figuras 95, 96 y 97.
Figura 95: MPL: ´Angulo de ataque durante el segundo crucero
130](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-130-320.jpg)

![3.4 Trimado longitudinal
´Angulo de ataque (α) Tim´on de Profundidad (δe)
Deflexi´on Max. -2.97 7.22
Deflexi´on Min. -3.07 7.05
Tabla 25: MPL: Deflexiones m´aximas y m´ınimas durante el segundo crucero
Misi´on de Ferry:
Se van a analizar los dos cruceros que se realizar´ıan en la misi´on de Ferry en el caso de
que hubiese desv´ıo. El procedimiento es completamente an´alogo a los casos anteriores, pero
considerando los datos del Departamento de Actuaciones para la misi´on Ferry. En este caso el
peso inicial de la aeronave es MTOWFerry = 14418,7kg.
1. Primer crucero.
Este tramo de estudio es el crucero m´as largo que tendr´a que realizar la aeronave (2500
mn). Se realiza a una altitud h = 35000ft, y a una velocidad v = 0,304 Mach = 90,39 m/s,
datos que habr´a que introducir en el modelo de avi´on.
El programa necesita los vectores de fracciones de peso y posiciones del centro de gravedad,
que para este tramo ser´an:
W
W0
= [0,9825, 0,7906, 0,7887] (3.20)
XCG
L
= [0,496, 0,496, 0,496] (3.21)
Introducciendo todos estos datos en el programa ASPro, se obtienen las gr´aficas de las
figuras 98, 99 y 100.
132](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-132-320.jpg)

![3.4 Trimado longitudinal
´Angulo de ataque (α) Tim´on de Profundidad (δe)
Deflexi´on Max. 4.52 -4.5
Deflexi´on Min. 2.5 -9
Tabla 26: Ferry: Deflexiones m´aximas y m´ınimas durante el primer crucero
2. Segundo crucero.
Este tramo de estudio es el crucero correspondiente al desv´ıo a otro aeropuerto. Se realiza
a una altitud h = 20000ft, y a una velocidad v = 0,205 Mach = 64,6 m/s.
Los vectores de fracciones de peso y posiciones del centro de gravedad, que para este tramo
ser´an:
W
W0
= [0,7831, 0,7775, 0,7764] (3.22)
XCG
L
=
XCG
L
= [0,496, 0,496, 0,496] (3.23)
Introducciendo todos estos datos en el programa ASPro, se obtienen las gr´aficas de las
figuras 101, 102 y 103.
Figura 101: Ferry: ´Angulo de ataque durante el segundo crucero de misi´on Ferry
134](https://image.slidesharecdn.com/fexheron-170529173654/85/F-Ex-Heron-134-320.jpg)