Descargado 16 veces






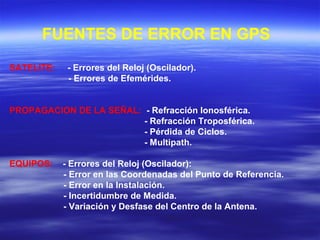














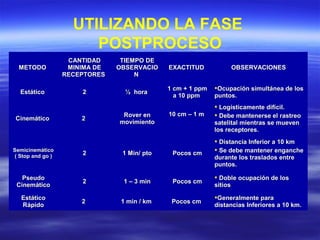





Este documento describe el funcionamiento del sistema GPS, incluyendo sus segmentos espacial, de control y de usuarios. Explica cómo los satélites GPS transmiten señales que permiten calcular la posición, velocidad y tiempo de un receptor GPS. También describe las fuentes de error en GPS y cómo se pueden corregir, así como diferentes técnicas de medición como estático, cinemático y RTK.




























































