Descargado 21 veces


![1. Introducción
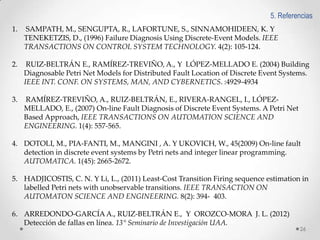
1.2 Antecedentes
• Enfoques: Autómatas finitos (AF), Redes de Petri (RP)
Autómatas Finitos
Diagnosticadores que
toman en cuenta la
alcanzabilidad del
esquema propuesto
Redes de Petri
Diagnosticadores basados en la estructura
matemática de la red
[Giúa y Seatzu,’01],[Dotoli,’09],[Basile,’09],
[Ramírez-Treviño, Ruiz-Beltrán ,’07,‘11]
[Sampath, ‘95, ‘96]
Diagnosticador: AF obtenido del
modelo del sistema
• Propiedad Diagnosticabilidad
• Capaz de realizar un diagnóstico en
línea
5](https://image.slidesharecdn.com/ingytecaarredondoelectronicapetri-131125132405-phpapp01/85/Diagnostico-de-fallas-utilizando-un-algoritmo-basado-en-Redes-de-Petri-5-320.jpg)

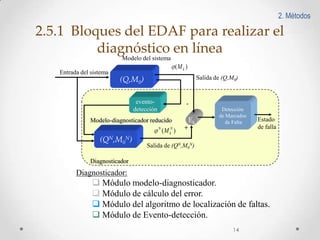
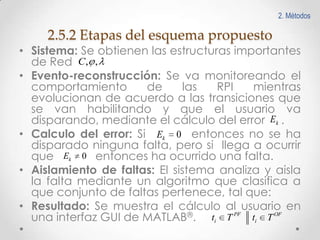


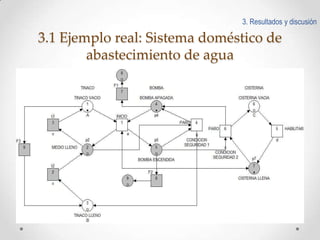




Este documento presenta un esquema de detección y aislamiento de fallas utilizando redes de Petri interpretadas y Matlab. El esquema incluye modelar el sistema y las fallas usando redes de Petri, obtener las estructuras matemáticas de la red, implementar un algoritmo de detección de fallas en Matlab, y simular el comportamiento del sistema y la detección de fallas en línea. Se provee un ejemplo de aplicación al sistema de abastecimiento de agua doméstico.















































