












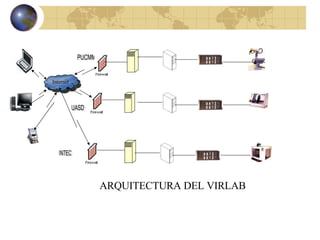
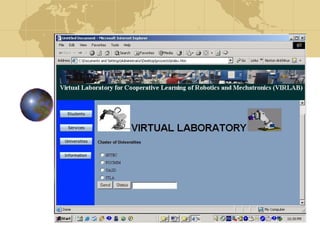
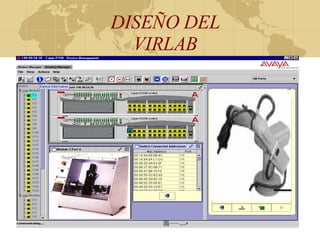


El documento describe el diseño de un Laboratorio Virtual para el Aprendizaje Colaborativo de Robótica y Mecatrónica. El laboratorio permitirá a estudiantes de diferentes universidades realizar experimentos de forma remota y asíncrona. El laboratorio aprovechará las tecnologías digitales y de comunicación para facilitar el aprendizaje flexible y a distancia en estas áreas.



























