Descargado 22 veces




















































![43
4.3.3.- Arrays: Las variables Arrays tienen un determinado número de
“elementos”, definido según el tamaño de la variable. Las variables Arrays tipo
Bit, pueden almacenar 256 elementos; las variables Arrays tipo Byte pueden
almacenar hasta 96 elementos y las variables Arrays tipo Word hasta 48
elementos, los cuales a su vez pueden ser accesados en cualquiera de los
tres casos a través de un índice. Este índice se específica entre corchetes
como se muestra en los siguientes ejemplos:
Para declarar una variable Array utilizamos el siguiente formato:
Dato Var Byte[7]
El primer elemento de esta variable es Dato[0] y el último elemento es
Dato[7], lo cual significa que hemos declarado una variable array de 8
elementos. En este caso podemos almacenar un byte en cada elemento,
siempre especificando el índice.
Ejemplo: Almacenar en cada elemento de la variable “Dato” los valores 200,
15, 56, 75, 80, 20, 33, 45.
Dato[0] = 200
Dato[1] = 15
Dato[2] = 56
Dato[3] = 75
Dato[4] = 80
Dato[5] = 20
Dato[6] = 33
Dato[7] = 45
En algunos casos se debe verificar la hoja de datos del microcontrolador, ya
que la cantidad de elementos que se pueden almacenar en variables arrays
tipo Byte o Word puede variar según el modelo del mismo.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-53-320.jpg)



























![71
Antes de empezar a programar, vamos a verificar la sintaxis de la instrucción
DTMFout:
DTMFout
Sintaxis: DTMFout pin, {On-ms, Off-ms}, [tono, tono,...tono]
La instrucción DTMFout genera tonos DTMF en secuencia y a través de un
puerto cualquiera del microcontrolador.
Pin: especifica el pin del puerto en el cual se emitirán los tonos DTMF.
On-ms: es una variable o constante que especifica la duración de cada tono
en milisegundos. En caso de no utilizar este parámetro, el tiempo por defecto
de cada tono es de 200 ms.
Off-ms: es una variable o constante que especifica el tiempo en milisegundos
del silencio que hay entre cada tono. En caso de no utilizar este parámetro, el
tiempo en silencio entre cada tono por defecto será de 50 ms.
Tono: puede ser una variable o constante entre 0 y 15, que especifica el tono
que debe ser generado.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-81-320.jpg)
![72
Programa en Pic Basic:
'****************************************
'* Nombre : Proyecto6.pbp *
'* Autor : Nombre del Autor *
'* Copyright : Copyright (Año) *
'* Fecha : Fecha *
'* Versión : 1.0 *
'****************************************
Define Osc 10 ' Define el Oscilador en 10 Mhz.
TRISA = $FE ' Configura el pin RA0 como Salida
' y el resto de los pines como entrada.
Inicio:
DTMFOut PORTA.0, [0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15]
Pause 2000 ' Genera una pausa de 2 segundos.
DTMFOut PORTA.0, 400, 150, [0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15]
Pause 2000 ' Genera una pausa de 2 segundos.
GoTo Inicio ' Salta a la etiqueta "Inicio".
End](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-82-320.jpg)


















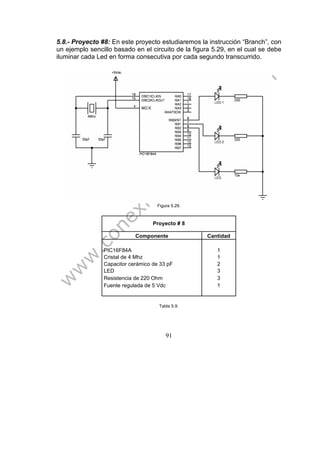
![92
Branch
Sintaxis: Branch Variable,[Etiqueta1, Etiqueta2,…EtiquetaN]
La instrucción Branch hace un salto a una etiqueta dependiendo del valor de
la variable, es decir, si la variable es igual a 0, el salto se hace a la etiqueta 1;
si la variable es igual a 1, el salto se hace a la etiqueta 2; si la variable es
igual a 2, el salto se hace a la etiqueta 3, y así sucesivamente.
Analice el siguiente programa:
'****************************************
'* Nombre : Proyecto8.pbp *
'* Autor : Nombre del Autor *
'* Copyright : Copyright (Año) *
'* Fecha : Fecha *
'* Versión : 1.0 *
'****************************************
I var Byte ' Declaración de la variable “I”
TRISB = $00 ' Configura el puerto B como salida
PORTB = $00 ' Inicializa el puerto B
I = 0 ' Inicializa la variable I
Inicio:
Branch I,[Led1,Led2,Led3]
Led1:
PORTB = %00000001 ' enciende el led en RB0
Pause 1000 ' pause de 1 segundo
PORTB = %00000000 ' apaga el led
I = I + 1 ' suma 1 a la variable I
GoTo inicio ' salta a inicio
Led2:
PORTB = %00000010 ' enciende el led en RB1
Pause 1000 ' pause de 1 segundo
PORTB = %00000000 ' apaga el Led
I = I + 1 ' suma 1 a la variable I
GoTo inicio ' salta a inicio](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-102-320.jpg)












































































![171
' Programa en Pic Basic Pro
Define Osc 4 ' Define el Oscilador para un Cristal
' de 4 Mhz.
' Configuración de Puertos:
TRISA = %00000000
TRISB = %00000000
TRISD = %01111000
' Declaramos las variables:
X VAR Byte
VAR1 VAR Byte
DIGITO VAR Byte[7]
CLV VAR Byte[7]
' Guardamos cada digito de la clave en las posiciones elegidas previamente:
Write 10, 1 ' Primer dígito de la clave
Write 11, 2 ' Segundo dígito de la clave
Write 12, 3 ' Tercer dígito de la clave
Write 13, 4 ' Cuarto dígito de la clave
Write 14, 5 ' Quinto dígito de la clave
Write 15, 6 ' Sexto dígito de la clave
' Iniciamos el sistema con una bienvenida:
Inicio:
LCDOut $fe, 2 ' Posiciona el cursor en el inicio
LCDOut "Cont. de Acceso"
LCDOut $fe,$C0, "** Bienvenido **"
Pause 2000 ' Hacemos una pausa de 2 segundos
Call Beep ' Generamos un sonido
Clave:
X = 0 ' inicializamos la variable X = 0
Read 10, CLV[1] ' leemos el primer dígito y lo guardamos en CLV[1]
Read 11, CLV[2] ' leemos el segundo dígito y lo guardamos en CLV[2]
Read 12, CLV[3] ' leemos el tercer dígito y lo guardamos en CLV[3]
Read 13, CLV[4] ' leemos el cuarto dígito y lo guardamos en CLV[4]
Read 14, CLV[5] ' leemos el quinto dígito y lo guardamos en CLV[5]
Read 15, CLV[6] ' leemos el sexto dígito y lo guardamos en CLV[6]
LCDOut $fe, 1 ' Limpia la LCD
LCDOut $fe, 2 ' Posiciona el cursor en el inicio
LCDOut "Introduzca su "
LCDOut $fe,$C0, "Clave de Acceso:"
Call Beep ' Generamos un sonido](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-181-320.jpg)
![172
Consulta:
Call Teclado ' Consultamos el teclado
If VAR1 = 0 Then consulta ' Si no hay una tecla pulsada vuelve a consultar
' Si VAR1 es diferente de cero, significa que pulsamos una tecla, por lo
' tanto generamos un sonido y continuamos…
Call Beep ' Generamos un sonido
' Seguidamente lo que hacemos es almacenar
' en seis variables definidas
' por el programador los dígitos introducidos
' desde el teclado matricial
' para luego ser comparados con los valores
' almacenados en la memoria de datos.
X = X + 1
DIGITO[X] = VAR1 ' El valor de la tecla pulsada lo
' guardamos en la variable correspondiente
If X = 6 Then comprobar ' Si X = 6 estamos guardando en DIGITO[6]
' el último valor introducido desde el
' teclado matricial
GoTo consulta ' Si X es diferente de 6 continuamos
' esperando el siguiente valor a ser
' ingresado desde el teclado
' A partir de la siguiente etiqueta empezamos la comprobación,
' y el formato es:
'
' Si DIGITO[X] es igual a CLV[X] el digito es correcto,
' y salta a la etiqueta “paseX”,
' si es diferente salta a la subrutina “error”; veamos…
Comprobar:
If DIGITO[1] = CLV[1] Then pase1:GoTo error
pase1:
If DIGITO[2] = CLV[2] Then pase2:GoTo error
pase2:
If DIGITO[3] = CLV[3] Then pase3:GoTo error
pase3:
If DIGITO[4] = CLV[4] Then pase4:GoTo error
pase4:
If DIGITO[5] = CLV[5] Then pase5:GoTo error
pase5:
If DIGITO[6] = CLV[6] Then correcto:GoTo error
' Si los seis dígitos han sido correctos
' se ejecuta la subrutina correspondiente.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-182-320.jpg)



















![193
Proyecto # 28 - 29
Componente Cantidad
PIC16F877A 1
Cristal de 4 Mhz 1
Capacitor cerámico de 22 pF 2
Pantalla LCD 16x2 1
Resistencia de 4,7K Ohm 2
Potenciómetro de 5K Ohm 1
Memoria EEPROM 24LC256 1
Fuente regulada de 5 Vdc 1
Tabla 10.1.
I2CWRITE
Sintaxis:
I2CWrite SDA, SCL, Control, Dirección, [dato], {etiqueta de salto opcional}
La instrucción I2CWrite enviará el dato de control y la dirección en la cual se
almacenará el dato cargado en la variable previamente cargada.
La primera actividad consiste en escribir un dato en una dirección específica
de la memoria de datos EEPROM conectada al bus I2C.
Analice el siguiente programa:
Define Osc 4 ' Define el Oscilador para un Cristal
' de 4 Mhz.
Symbol SDA = PORTB.0 ' Alias para RB0
Symbol SCL = PORTB.1 ' Alias para RB1](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-203-320.jpg)
![194
Direc VAR Word ' Declaración de variable "Direc"
Control VAR Byte ' Declaración de variable "Control"
Dato VAR Byte ' Declaración de variable "Dato"
Pause 200 ' Pausa de 200 milisegundos para la LCD
LCDOut $fe, 1 ' Limpia la LCD
Inicio:
Control = $A0 ' Dato de Control
Direc = $10 ' Dirección en la memoria externa
Dato = $23 ' Dato a ser cargado en la dirección
' especificada ($23 = 35 Decimal)
I2Cwrite SDA, SCL, Control, Direc, [dato] ' Escribe la memoria
Pause 10 ' Pausa de 10 milisegundos
LCDOUT $fe, 2, "Dato Grabado" ' Muestra mensaje por la LCD
Loop: GoTo Loop
End
A partir de la etiqueta “Inicio”, asignamos valores a las variables declaradas.
El dato de control, el cual contiene la dirección de la memoria 24LC256 es
“$A0”; la dirección en la cual vamos a almacenar un dato en este ejemplo será
“$10”; y por último el dato a ser almacenado será “$23”.
Si se pregunta porqué el dato de control es $A0, podrá obtener la respuesta
verificando la conexión de la memoria en el circuito de la figura 10.4. Observe
que los pines A2, A1 y A0, los hemos conectado a tierra.
Recuerde que estos tres pines definen la dirección del dispositivo; entonces,
debemos tomar en cuenta que para una memoria serial, los cuatro bits más
significativos están configurados como “1010xxxx”; los tres bits A2, A1 y A0
están conectados a tierra en este proyecto; y el bit R/W debe estar en “0” para
poder escribir un dato en la memoria (ver figura 10.5).
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 (A2) Bit 2 (A1) Bit 1 (A0) Bit 0 (R/W)
1 0 1 0 0 0 0 0
A 0
Figura 10.5.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-204-320.jpg)
![195
Para enviar el dato a la memoria en la dirección especificada, utilizamos la
instrucción I2CWrite de la siguiente manera:
I2Cwrite PORTB.0, PORTB.1, $A0, $10, [$23]
Note que en el programa utilizamos los alias y las variables:
I2Cwrite SDA, SCL, Control, Direc, [dato]
Seguidamente se requiere de una pausa de 10 milisegundos, para asegurar el
tiempo necesario para la grabación del dato en la memoria. Una vez finalizada
la pausa, procedemos a mostrar un mensaje en la pantalla LCD, indicando
que el dato ya ha sido grabado.
I2CREAD
Sintaxis:
I2Cread SDA, SCL, Control, Dirección, [dato], {etiqueta de salto opcional}
La instrucción I2Cread enviará el dato de control y la dirección específica a un
dispositivo conectado a un bus I2C y almacenará el dato obtenido en una
variable definida. Al utilizar la etiqueta opcional, el programa saltará si no se
recibe ninguna respuesta del dispositivo consultado.
Para verificar que este dato en realidad está grabado en la memoria, y en la
dirección correcta, veamos el siguiente programa:
Define Osc 4 ' Define el Oscilador para un Cristal de 4 Mhz.
Symbol SDA = PORTB.0 ' Alias para RB0
Symbol SCL = PORTB.1 ' Alias para RB1
A1 Var Byte ' Declaración de variable "A1"
Direc var Word ' Declaración de variable "Direc"
Control Var Byte ' Declaración de variable "Control"
Pause 200 ' Pause de 200 milisegundos](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-205-320.jpg)
![196
LCDOut $fe, 1 ' Limpia la LCD
Inicio:
Direc = $10 ' Dirección en la memoria externa
Control = $A0 ' Dato de Control
I2CREAD SDA, SCL, Control, Direc, [A1] ' Lectura de Memoria
LCDOUT $fe, 2,"Dato: ",#A1 ' Muestra el dato leido
Ciclo: GoTo Ciclo
End
10.3.- Proyecto #29: El siguiente programa almacena datos a partir de la
dirección cero ($00) de la memoria EEPROM conectada al bus I2C. Se
almacenan números que se incrementan de dos en dos, donde el dato inicial
es igual a 1. Este proyecto está basado en el diagrama de la figura 10.4.
Analice el siguiente programa:
' Programa en Pic Basic Pro
Define Osc 4 ' Define el Oscilador para un Cristal
' de 4 Mhz.
Symbol SDA = PORTB.0 ' Alias para RB0
Symbol SCL = PORTB.1 ' Alias para RB1
I VAR Byte ' Declaración de variable "I"
A1 VAR Byte ' Declaración de variable "A1"
Direc VAR Word ' Declaración de variable "Direc"
Control VAR Byte ' Declaración de variable "Control"
Dato VAR Byte ' Declaración de variable "Dato"
Pause 200 ' Pausa de 200 milisegundos para la LCD
LCDOut $fe, 1 ' Limpia la LCD
Direc = $00 ' Dirección en la memoria externa
Control = $A0 ' Dato de Control
Dato = 1 ' Dato inicial a ser grabado
Escribir:
For I = 0 To 50 ' Repetición
I2Cwrite SDA, SCL, Control, Direc, [dato] ' Escribe la memoria
Pause 10 ' Pausa de 10 milisegundos
If I = 50 Then leer ' Condicional
Direc = Direc + 1 ' Suma 1 a la variable "Direc"
Dato = Dato + 2 ' Suma 2 a la variable "Dato"
Next I](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-206-320.jpg)
![197
Leer:
LCDOUT $fe, 2,"Datos Grabados" ' Muestra mensaje por la LCD
Pause 2000 ' Pausa de 2 segundos
LCDOut $fe, 2,"Inicia Lectura" ' Muestra mensaje por la LCD
Pause 2000 ' Pausa de 2 segundos
Direc = $00 ' Inicializa la dirección en la memoria externa
For I = 0 To 50 ' Repetición
I2CREAD SDA, SCL, Control, Direc, [A1] ' Lectura de memoria
LCDOUT $fe, 2,"Dato ",#I,": ",#A1," " ' Muestra el dato leido
Pause 1000 ' Pausa de 1 segundo
If I = 50 Then final ' Condicional
Direc = Direc + 1 ' Suma 1 a la variable "Direc"
Next I
Final:
GoTo Final ' Salta a la etiqueta "final"
End
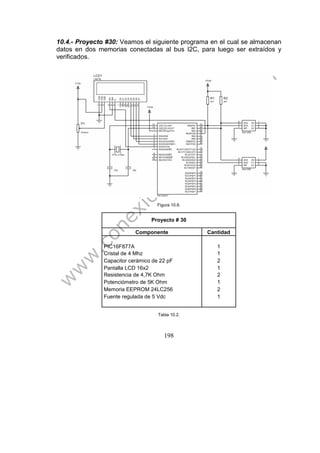
En caso de requerir mayor capacidad de memoria de datos para nuestros
proyectos, podemos utilizar memorias como la 24LC512 o varias de menor o
igual capacidad conectadas al bus I2C como se observa en la figura 10.6.
Por supuesto, es importante resaltar que cuando se tiene mas de una
memoria conectada al bus, se debe considerar el conexionado de los Pines 1,
2 y 3 (A0, A1 y A2 respectivamente). En el programa también debemos tomar
en cuenta que para leer cada una de estas memorias, tenemos que
especificar la dirección del “dispositivo”.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-207-320.jpg)
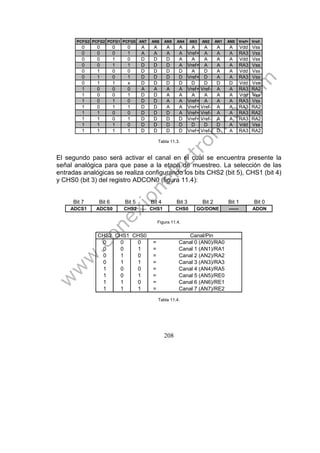
![199
Analice el siguente programa, prestando atención a los comentarios de cada
línea:
Define Osc 4 ' Define el Oscilador para un Cristal
' de 4 Mhz.
Symbol SDA = PORTB.0 ' Alias para RB0
Symbol SCL = PORTB.1 ' Alias para RB1
I VAR Byte ' Declaración de variable "I"
A1 VAR Byte ' Declaración de variable "A1"
Direc VAR Word ' Declaración de variable "Direc"
Control VAR Byte ' Declaración de variable "Control"
Dato VAR Byte ' Declaración de variable "Dato"
Pause 200 ' Pausa de 200 milisegundos para la LCD
LCDOut $fe, 1 ' Limpia la LCD
memoria1:
' Escribimos en la memoria 1 (Pin A0 = 0; Pin A1 = 0; Pin A2 = 0)
' xxxxAAAx
' xxxx210x
Control = %10100000 ' Dato de Control
Direc = $00 ' Dirección en la memoria externa
Dato = 1 ' Dato inicial a ser grabado
For I = 0 To 20 ' Repetición
I2Cwrite SDA, SCL, Control, Direc, [dato] ' Escribe la memoria
Pause 10 ' Pausa de 10 milisegundos
If I = 20 Then confirma1 ' Condicional
Direc = Direc + 1 ' Suma 1 a la variable "Direc"
Dato = Dato + 2 ' Suma 2 a la variable "Dato"
Next I
confirma1:
LCDOUT $fe, 2,"Datos Grabados" ' Muestra mensaje por la LCD
LCDOut $fe,$C0,"Memoria 1 "
Pause 2000 ' Pausa de 2 segundos
' Escribimos en la memoria 2 (Pin A0 = 1; Pin A1 = 0; Pin A2 = 0)
memoria2:
' xxxxAAAx
' xxxx210x
Control = %10100010 ' Dato de Control](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-209-320.jpg)
![200
Direc = $00 ' Dirección en la memoria externa
Dato = 150 ' Dato inicial a ser grabado
For I = 0 To 20 ' Repetición
I2Cwrite SDA, SCL, Control, Direc, [dato] ' Escribe la memoria
Pause 10 ' Pausa de 10 milisegundos
If I = 20 Then confirma2 ' Condicional
Direc = Direc + 1 ' Suma 1 a la variable "Direc"
Dato = Dato + 5 ' Suma 2 a la variable "Dato"
Next I
confirma2:
LCDOUT $fe, 2,"Datos Grabados" ' Muestra mensaje por la LCD
LCDOut $fe,$C0,"Memoria 2 "
Pause 2000
' Iniciamos la lectura en la memoria 1:
lectura1:
LCDOut $fe, 2,"Inicia Lectura" ' Muestra mensaje por la LCD
LCDOut $fe,$C0,"Memoria 1 "
Pause 2000 ' Pausa de 2 segundos
' xxxxAAAx
' xxxx210x
Control = %10100000 ' Dato de Control
Direc = $00 ' Dirección en la memoria externa
For I = 0 To 20 ' Repetición
I2CREAD SDA, SCL, Control, Direc, [A1] ' Lectura de memoria
LCDOUT $fe, 2,"Dato ",#I,": ",#A1," " ' Muestra el dato leido
Pause 1000 ' Pausa de 1 segundo
If I = 20 Then lectura2 ' Condicional
Direc = Direc + 1 ' Suma 1 a la variable "Direc"
Next I
lectura2:
LCDOut $fe, 2,"Inicia Lectura" ' Muestra mensaje por la LCD
LCDOut $fe,$C0,"Memoria 2 "
Pause 2000 ' Pausa de 2 segundos
' xxxxAAAx
' xxxx210x
Control = %10100010 ' Dato de Control
Direc = $00 ' Dirección en la memoria externa
For I = 0 To 20 ' Repetición
I2CREAD SDA, SCL, Control, Direc, [A1] ' Lectura de memoria](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-210-320.jpg)






























![233
12.4.- Instrucción SerOut: La instrucción SerOut en PicBasic se encarga de
enviar uno o mas valores a través de un pin específico, usando el formato
asíncrono estándar 8N1, que significa 8 bits de datos, sin revisión de paridad
y 1 bit de parada (stop).
Sintaxis: SEROUT pin, modo, [variable]
Pin: en este campo definiremos cual será el pin de salida entre los puertos
disponibles del microcontrolador. Ejemplo: PortB.5
Modo: define la velocidad de transmisión en baudios y emplea la misma tabla
de la instrucción Serin (Tabla 12.1).
Variable: En este campo se especifica la variable que contiene los datos que
serán enviados a través de pin especificado. Ejemplo:
SerOut PORTC.6, T9600, [variable]
12.5.- Proyecto #33: Comenzaremos por realizar el circuito de la figura 12.17,
el cual será conectado al PC a través del puerto serial COM1, y a través del
HyperTerminal de Windows veremos como son transmitidos los datos desde
el microcontrolador hasta el PC.
Veamos el siguiente programa en PBP:
Define Osc 4 ' Define el Oscilador para un Cristal
' de 4 Mhz.
Symbol T9600 = 2 ' Dato verdadero (Driven True)
I VAR Byte ' Define la variable “I” como Byte
inicio:
For I = 0 To 9 ' Repetición de 0 a 9
SerOut PORTC.6, T9600, [#I] ' Envía los datos a través del pin RC6
pause 1000 ' Pausa de 1 segundo
Next I](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-243-320.jpg)


![236
Deberá tomar en cuenta entonces, que los parámetros de comunicación
cambian, debido a que los datos ya no pasarán a través del inversor integrado
en el MAX232.
Esto significa que el programa a utilizar para el circuito de la figura 12.18 es el
siguiente:
Define Osc 4 ' Define el Oscilador para un Cristal
' de 4 Mhz.
Symbol N9600 = 6 ' Dato invertido (Driven inverted)
dato var Byte ' Define la variable “dato” como Byte
I var Byte ' Define la variable “I” como Byte
Inicio:
For I = 0 To 9 ' Repetición de 0 a 9
SerOut PORTC.6, N9600, [#I] ' envía los datos a través del pin RC6
Pause 1000 ' Pausa de 1 segundo
Next I
GoTo Inicio ' Salta a inicio
End
Para abrir el HyperTerminal de Windows, haga clic en el menú Inicio Todos
los Programas Accesorios Comunicaciones HyperTerminal. Escriba un
nombre para la conexión y haga clic en “Aceptar”.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-246-320.jpg)






![243
ADCON1 = %10000000 ' Configura el registro ADCON1
LCDOut $fe, 1 ' Limpia la LCD
inicio:
ADCIN 0, A ' Inicia la conversión, almacena el resultado en "A"
LCDOut $fe, 2 ' Posiciona el cursor en el inicio
LCDOUT "C-AD a 10 Bit: " ' Muestra mensaje en la línea 1
LCDOUT $fe,$C0,"Dato: ",Dec A," " ' Muestra dato en la línea 2
SerOut PORTC.6, T9600, [#A] ' envía los datos al PC
pause 500 ' Pausa de 500 milisegundos
GoTo inicio ' Salta a inicio
End
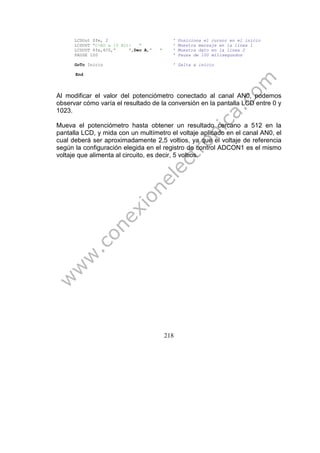
En el programa se puede observar cómo hemos definido el conexionado de la
pantalla LCD, así como también la configuración básica establecida para el
conversor A/D, el cual hará la conversión a 10 bits con el fin de obtener una
mayor resolución en el proceso de medición del voltaje aplicado al pin RA0.
Una vez iniciada la conversión, se puede observar que el resultado de la
misma es almacenada en la variable “A”, la cual hemos declarado como una
variable de 16 bits (word), debido a que el resultado de la conversión requiere
mas de ocho bits de datos. Este resultado puede ser mostrado fácilmente en
la pantalla LCD en decimal anteponiendo la directiva “Dec” a la variable en la
cual hemos almacenado el dato resultado de la conversión.
El siguiente paso en el programa consiste en enviar el dato obtenido al PC a
través del puerto serial, para luego hacer una pequeña pausa de 500
milisegundos y empezar nuevamente el proceso para una nueva lectura.
Un paso importante en este punto, una vez obtenido el resultado de la
conversión A/D en la pantalla LCD, será verificar la transferencia de datos
hacia el PC con la ayuda del HyperTerminal de Windows.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-253-320.jpg)






































![282
Programa para el microcontrolador secundario U2:
DEFINE OSC 4
Symbol T9600 = 2 ' Dato verdadero (Driven True)
PULSO VAR Word ' Define la variable "Pulso" (16 Bits)
PULSO = 155 ' Inicializa variable "Pulso"
inicio:
If PORTA.0 = 1 And PULSO < 250 Then Call suma
' Si RA0 = 1 significa que se ha activado el pulsador
' conectado a él. La condición se cumple sólo si el pulsador
' está activado y la variable "Pulso" es menor a 250.
If PORTA.1 = 1 And PULSO > 60 Then Call resta
' Si RA1 = 1 significa que se ha activado el pulsador
' conectado a él. La condición se cumple sólo si el pulsador
' está activado y la variable "Pulso" es mayor a 60.
GoTo inicio ' Salto a inicio
suma:
PULSO = PULSO + 10 ' Suma 10 a la variable "Pulso"
SerOut PORTA.2, T9600, [PULSO] ' Envía dato serial por RA2
PAUSE 40 ' Pausa de 40 milisegundos
Return ' Retorno
resta:
PULSO = PULSO - 10 ' Resta 10 a la variable "Pulso"
SerOut PORTA.2, T9600, [PULSO] ' Envía dato serial por RA2
PAUSE 40 ' Pausa de 40 milisegundos
Return ' Retorno
End](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-292-320.jpg)















![299
For I = 0 To 9 ' Repetición de 0 a 9
SerOut PORTB.0, T9600, [I] ' Envía los datos por RB0
LCDOut $fe, 2,"Dato: ",#I ' Muestra dato por la LCD
Pause 1000 ' Pausa de 1 segundo
Next I
GoTo inicio ' Salta a inicio y reinicia el conteo
End
Programa para el circuito receptor:
Symbol T9600 = 2 ' Dato verdadero (Driven True)
dato var Byte ' Define la variable "dato" como Byte
pause 500 ' Pausa de 500 milisegundos para la LCD
LCDOut $fe, 1 ' Limpia la LCD
inicio:
SerIn PORTB.7, T9600, dato ' espera datos durante 1 ms
LCDOUT $fe, 2,"Dato: ",#dato," "
GoTo inicio ' Salta a inicio
End
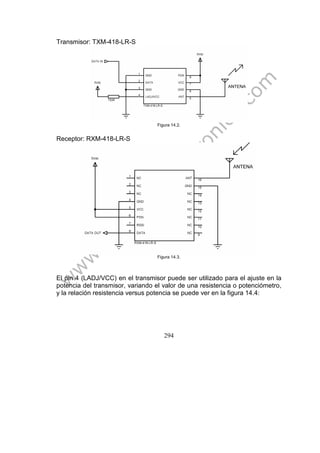
Como podemos observar en los diagramas de los circuitos, los módulos TXM-
418-LR-S y RXM-418-LR-S conforman el medio a través del cual viajan los
datos, sustituyendo al cable, cuyas limitaciones son de apenas unos pocos
metros cuando se requiere de comunicación serial RS-232.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-309-320.jpg)


![302
Proyecto # 40
Componente Cantidad
PIC16F877A 1
PIC16F84A 1
Cristal de 4 Mhz 2
Capacitor cerámico de 22 pF 4
Pantalla LCD 16x2 2
TXM-418-LR-S con antena 1
RXM-418-LR-S con antena 1
Resistencia de 1K Ohm 4
Resistencia de 390 Ohm 2
Resistencia de 750 Ohm 1
Resistencia de 10K Ohm 1
Potenciómetro de 5K Ohm 2
Teclado Matricial 3x4 1
Fuente regulada de 3.3 Vdc / 5 Vdc 2
Tabla 14.2.
Programa para el circuito transmisor con teclado matricial:
Symbol T9600 = 2 ' Dato verdadero (Driven True)
TRISD = %01111000 ' Configuración de Puerto D
TECLA VAR Byte ' Declaración de variable "Tecla"
pause 500 ' Pausa de 500 milisegundos para la LCD
LCDOut $fe, 1 ' Limpia la LCD
inicio:
Call teclado ' Llama a rutina de barrido de teclas
PAUSE 100 ' Pausa de 1050 milisegundos
SerOut PORTB.0, T9600, [TECLA] ' Envía dato por RB0
LCDOUT $fe, 2,"Dato: ",#TECLA ' Muestra dato por la LCD](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-312-320.jpg)




![307
Programa para el circuito transmisor con teclado matricial:
Symbol T9600 = 2 ' Dato verdadero (Driven True)
TRISD = %01111000 ' Configuración de Puerto D
TECLA VAR Byte ' Declaración de variable "Tecla"
Pause 200 ' Pausa de 200 milisegundos para la LCD
LCDOut $fe, 1 ' Limpia la LCD
inicio:
Call teclado ' Llama a rutina de barrido de teclas.
If tecla = 0 Then inicio ' Si TECLA = 0 ninguna tecla fue
' presionada y salta de nuevo a
' la etiqueta inicio.
SerOut PORTB.0, T9600, [%10011001] ' Envía código de confirmación.
PAUSE 200
SerOut PORTB.0, T9600, [TECLA] ' Envía dato por RB0
PAUSE 300 ' Pausa de 300 milisegundos
LCDOUT $fe, 2,"Dato: ",#TECLA," " ' Muestra dato por la LCD
GoTo inicio ' Salto a inicio
teclado:
tecla = 0
PORTD.0 = 0 ' Columna 1 = 0
PORTD.1 = 1 ' Columna 2 = 1
PORTD.2 = 1 ' Columna 3 = 1
If PORTD.3 = 0 Then TECLA = 1 ' tecla "1"
If PORTD.4 = 0 Then TECLA = 4 ' tecla "4"
If PORTD.5 = 0 Then TECLA = 7 ' tecla "7"
If PORTD.6 = 0 Then TECLA = 10 ' tecla "*"
PORTD.0 = 1 ' Columna 1 = 1
PORTD.1 = 0 ' Columna 2 = 0
PORTD.2 = 1 ' Columna 3 = 1
If PORTD.3 = 0 Then TECLA = 2 ' tecla "2"
If PORTD.4 = 0 Then TECLA = 5 ' tecla "5"
If PORTD.5 = 0 Then TECLA = 8 ' tecla "8"](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-317-320.jpg)




![312
Branch
Sintaxis:
Branch Variable,[Etiqueta1, Etiqueta2,…EtiquetaN]
La instrucción Branch hace un salto a una etiqueta dependiendo del valor de
la variable, es decir, si la variable es igual a 0, el salto se hace a la etiqueta 1;
si la variable es igual a 1, el salto se hace a la etiqueta 2; si la variable es
igual a 2, el salto se hace a la etiqueta 3, y así sucesivamente.
Ejemplo:
I var Byte ' Declaración de Variable I
TRISB = $00 ' Configura el puerto B como salida
PORTB = $00 ' Inicializa el puerto B
I = 0 ' Inicializa la variable I
inicio:
Branch I,[Led1,Led2,Led3]
Led1:
PORTB = %00000001 ' enciende el led en RB0
pause 1000 ' pause de 1 segundo
PORTB = %00000000 ' apaga el led
I = I + 1 ' suma 1 a la variable I
GoTo inicio ' salta a inicio
Led2:
PORTB = %00000010 ' enciende el led en RB1
pause 1000 ' pause de 1 segundo
PORTB = %00000000 ' apaga el Led
I = I + 1 ' suma 1 a la variable I
GoTo inicio ' salta a inicio
Led3:
PORTB = %00000100 ' enciende el led en RB2
pause 1000 ' pause de 1 segundo
PORTB = %00000000 ' apaga el Led
I = 0 ' Inicializa la variable I
GoTo inicio ' salta a inicio
End](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-322-320.jpg)




![317
Data
Sintaxis:
Data {@Dirección inicial}, constante1, constante2,…constanteN
La instrucción “Data” solo puede ser utilizada para las familias de
microcontroladores que incorporan memoria EEPROM en su arquitectura.
Para los microcontroladores que no cuentan con esta memoria, existe la
posibilidad de agregar una memoria EEPROM externa a través del protocolo
de comunicación I2C.
Básicamente esta instrucción guarda varias constantes a partir de una
dirección que especificamos en el campo correspondiente.
Ejemplo:
Data @10,1,3,5,7,9
En este ejemplo, la instrucción Data almacenará los valores 1, 3, 5, 7 y 9 en
las direcciones de memoria 10, 11, 12, 13 y 14 respectivamente.
DTMFout
Sintaxis:
DTMFout pin, {On-ms, Off-ms}, [tono, tono,...tono]
La instrucción DTMFout genera tonos DTMF en secuencia y a través de un
puerto cualquiera del microcontrolador.
Pin: especifica el pin del puerto en el cual se emitirán los tonos DTMF.
On-ms: es una variable, constante o expresión que especifica la duración de
cada tono en milisegundos. En caso de no utilizar este parámetro, el tiempo
por defecto de cada tono es de 200 ms.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-327-320.jpg)

![319
Figura 15.2.
Ejemplo:
DTMFout PortC.0, [0,1,2,3,4,5,6,7,8,9]
Conectando el pin de salida (RC0) adecuadamente a una línea telefónica,
estaremos marcando sin problemas un número telefónico. En algunos casos
es recomendable utilizar los tiempos On-ms y Off-ms para realizar un
marcado más exacto.
Ejemplo:
DTMFout PortC.0,400,150, [6,4,3,8,7,1,0]](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-329-320.jpg)

![321
EEPROM
Sintaxis:
EEPROM dirección,[constante1, constante2,….constanteN]
La instrucción “EEPROM” es capaz de almacenar datos en la memoria de
datos de un microcontrolador siempre y cuando éste cuente con esta
característica y a partir de la dirección indicada, almacena constantes
específicas en las posiciones consecutivas a la inicial.
Es importante resaltar que los datos solo son almacenados al momento de
grabar el microcontrolador en nuestro programador para microcontroladores
PIC, por lo tanto, para realizar lecturas o grabaciones de nuevos datos
durante la ejecución de un programa se debe recurrir a las instrucciones Read
y Write.
END
Sintaxis:
End
La instrucción “END” detiene la ejecución de un programa y pone el
microcontrolador en bajo consumo de energía.
FREQOUT
Sintaxis:
FreqOut pin, On-ms, Frecuencia1, Frecuencia2
La instrucción “FreqOut” genera una o dos señales de frecuencia entre 0 y
32767 Hz previamente definidas, durante un período de tiempo también
definido.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-331-320.jpg)



![325
GoTo inicio
End
I2CREAD
Sintaxis:
I2Cread SDA, SCL, Control, Dirección, [dato], {etiqueta de salto opcional}
La instrucción “I2Cread” enviará el dato de control y la dirección específica a
un dispositivo conectado a un bus I2C y almacenará el dato obtenido en una
variable definida. Al utilizar la etiqueta opcional, el programa saltará si no se
recibe ninguna respuesta del dispositivo consultado.
Ejemplo:
SDA VAR PORTB.0
SCL VAR PORTB.1
A1 VAR Byte
Direc VAR Word
Control VAR Byte
Pause 500 ' Pause de 500 milisegundos
LCDOut $fe, 1 ' Limpia la LCD
inicio:
Direc = $10 ' Dirección en la memoria externa
Control = $A0 ' Dato de Control
I2CREAD SDA, SCL, Control, Direc, [A1] ' Lectura de
' memoria
LCDOUT $fe, 2,"Dato: ",#A1 ' Muestra el dato leído
ciclo: GoTo ciclo
End](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-335-320.jpg)
![326
I2CWRITE
Sintaxis:
I2CWrite SDA, SCL, Control, Dirección, [dato], {etiqueta de salto opcional}
La instrucción “I2CWrite” enviará el dato de control y la dirección en la cual se
almacenará el dato cargado en la variable previamente cargada.
Ejemplo:
SDA VAR PORTB.0
SCL VAR PORTB.1
Direc var Word
Control Var Byte
inicio:
Direc = $10 ' Dirección en la memoria externa
Control = $A0 ' Dato de Control
I2Cwrite SDA, SCL, Control, Direc, [$21] ' Escribe la
' memoria
pause 10 ' Pausa de 10 milisegundos
Loop: GoTo Loop
End
IF – THEM – ELSE
Sintaxis:
If expresión 1 {AND / OR expresión 2} Then etiqueta
Con la instrucción “If – Them” podemos seleccionar uno, dos o mas posibles
comportamientos de programa, tomando decisiones en una estructura de
programación sencilla y la cual será considerada casi en la totalidad de los
programas.](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-336-320.jpg)


![329
LCDIN
Sintaxis:
LCDin dirección, [variable1, variable2,…]
La instrucción “LCDin” carga el dato almacenado en una dirección de la
memoria RAM de la LCD en una variable previamente definida.
Ejemplo:
A VAR Byte
inicio:
LCDIn $10,[A] ' Lee el dato en la dirección de memoria $10
' y lo carga en la variable "A".
Espera:
GoTo Espera
End](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-339-320.jpg)













![343
LCDOUT $fe, 2,"Dato: "
LCDOut $fe,$C0,#dato," "
GoTo Inicio ' Salta a inicio
End
SEROUT
Sintaxis:
SEROUT pin, modo, [variable]
La instrucción “SerOut” se encarga de enviar uno o mas valores a través de
un pin específico usando el formato asíncrono estándar 8N1 que significa 8
bits de datos, sin revisión de paridad y 1 bit de parada (stop).
Pin: en este campo definiremos cual será el pin de salida entre los puertos
disponibles del microcontrolador.
Modo: define la velocidad de transmisión en baudios y emplea la misma tabla
de la instrucción SerIn.
Variable: en este campo se especifica la variable que contiene los datos que
serán enviados a través de pin especificado.
Ejemplo:
Symbol T9600 = 2 ' Dato verdadero (Driven True)
I VAR Byte ' Define la variable “I” como Byte
Inicio:
For I = 0 To 9 ' Repetición de 0 a 9
SerOut PORTC.6, T9600, [#I] ' “#” envía los datos en ASCII
Pause 1000 ' Pausa de 1 segundo
Next I](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-353-320.jpg)














![358
Apéndice B Tabla ASCII
ASCII Control Characters
Decimal Hex ASCII Function Key
0 0 NUL (null) Ctrl-@
1 1 SOH (start of heading) Ctrl-A
2 2 STX (start of text) Ctrl-B
3 3 ETX (end of text) Ctrl-C
4 4 EOT (end of transmission) Ctrl-D
5 5 ENQ (enquiry) Ctrl-E
6 6 ACK (acknowledge) Ctrl-F
7 7 BEL (bell) Ctrl-G
8 8 BS (backspace) Ctrl-H
9 9 HT (horizontal tab) Ctrl-I
10 A LF (line feed) Ctrl-J
11 B VT (vertical tab) Ctrl-K
12 C FF (form feed) Ctrl-L
13 D CR (carriage return) Ctrl-M
14 E SO (shift out) Ctrl-N
15 F SI (shift in) Ctrl-O
16 10 DLE (data link escape) Ctrl-P
17 11 DC1 (device control 1) Ctrl-Q
18 12 DC2 (device control 2) Ctrl-R
19 13 DC3 (device control 3) Ctrl-S
20 14 DC4 (device control 4) Ctrl-T
21 15 NAK (negative acknowledge) Ctrl-U
22 16 SYN (synchronous idle) Ctrl-V
23 17 ETB (end of trans. block) Ctrl-W
24 18 CAN (cancel) Ctrl-X
25 19 EM (end of medium) Ctrl-Y
26 1A SUB (substitute) Ctrl-Z
27 1B ESC (escape) Ctrl-[
28 1C FS (file separator) Ctrl-
29 1D GS (group separator) Ctrl-]
30 1E RS (record separator) Ctrl-^
31 1F US (unit separator) Ctrl-_
Tabla B.1.
Fuente: http://www.melabs.com/resources/pbpmanual/](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-368-320.jpg)
![359
Caracteres ASCII Standard
Decimal Hex Display / Key
32 20 Space
33 21 !
34 22 "
35 23 #
36 24 $
37 25 %
38 26 &
39 27 '
40 28 (
41 29 )
42 2A *
43 2B +
44 2C ,
45 2D -
46 2E .
47 2F /
48 30 0
49 31 1
50 32 2
51 33 3
52 34 4
53 35 5
54 36 6
55 37 7
56 38 8
57 39 9
58 3A :
59 3B ;
60 3C <
61 3D =
62 3E >
63 3F ?
Decimal Hex Display / Key
64 40 @
65 41 A
66 42 B
67 43 C
68 44 D
69 45 E
70 46 F
71 47 G
72 48 H
73 49 I
74 4A J
75 4B K
76 4C L
77 4D M
78 4E N
79 4F O
80 50 P
81 51 Q
82 52 R
83 53 S
84 54 T
85 55 U
86 56 V
87 57 W
88 58 X
89 59 Y
90 5A Z
91 5B [
92 5C
93 5D ]
94 5E ^
95 5F _
Decimal Hex Display / Key
96 60 `
97 61 a
98 62 b
99 63 c
100 64 d
101 65 e
102 66 f
103 67 g
104 68 h
105 69 i
106 6A j
107 6B k
108 6C l
109 6D m
110 6E n
111 6F o
112 70 p
113 71 q
114 72 r
115 73 s
116 74 t
117 75 u
118 76 v
119 77 w
120 78 x
121 79 y
122 7A z
123 7B {
124 7C |
125 7D }
126 7E ~
127 7F DEL
Tabla B.2.
Fuente: http://www.melabs.com/resources/pbpmanual/](https://image.slidesharecdn.com/lenguajebasic364hojas-140419171002-phpapp02/85/LENGUAJE-BASIC-WILBER-PINILLA-369-320.jpg)




Este documento presenta una guía para el uso de microcontroladores PIC y el lenguaje de programación PicBasic. Se divide en varios capítulos que explican conceptos como herramientas de diseño, el entorno de desarrollo MicroCode Studio, la estructura y componentes de PicBasic, y proyectos prácticos para implementar diferentes instrucciones y funcionalidades como LCDs, teclados, memoria, interrupciones, comunicación I2C, ADC y comunicación serial. El objetivo es proporcionar los conocimientos básicos para programar y desarrollar




















































