Descargar para leer sin conexión




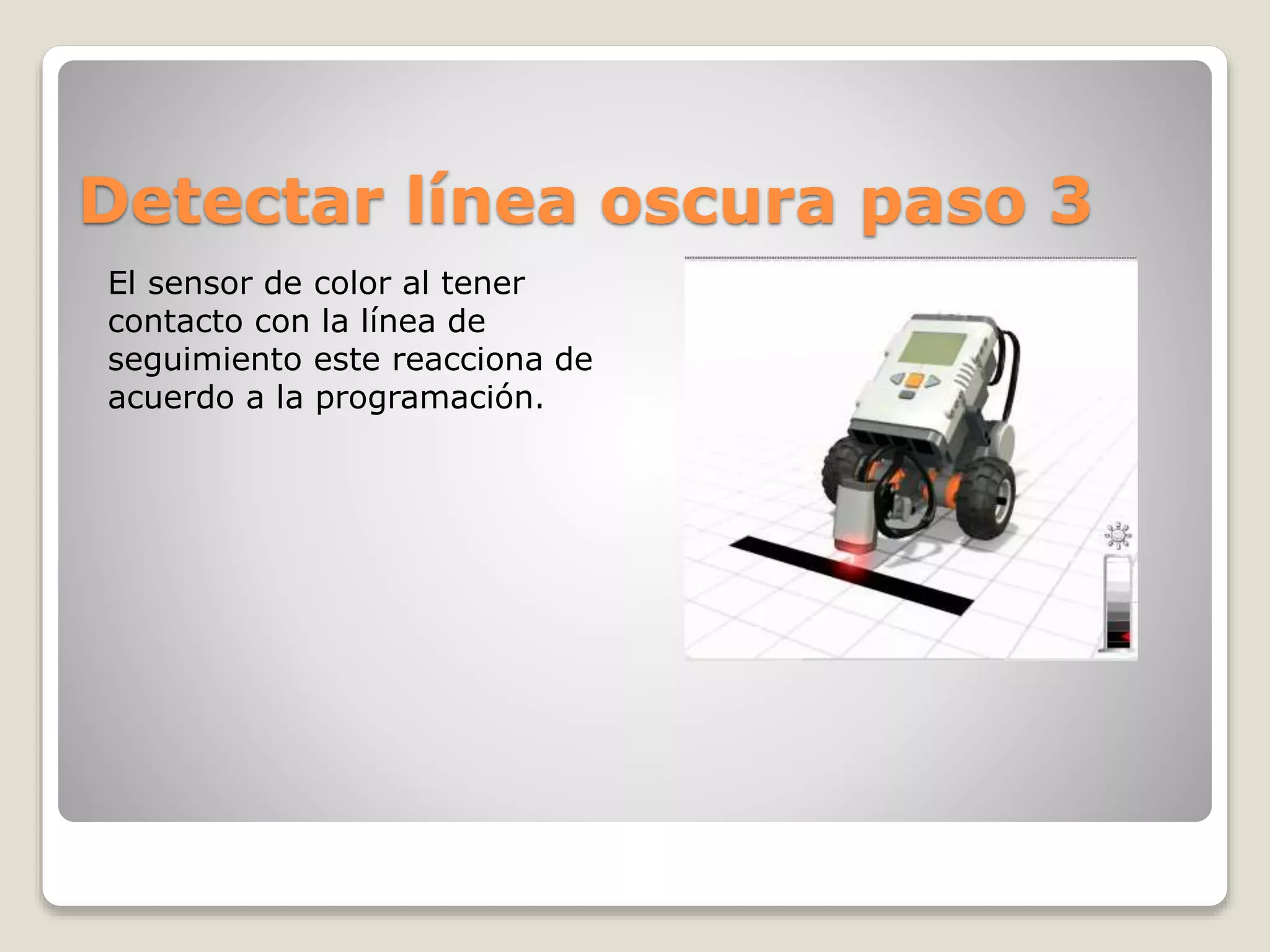

El documento describe los pasos para que un robot detecte y siga una línea oscura, incluyendo colocar el robot a una distancia de la línea, activar el movimiento y sensor de color del robot para que avance, y hacer que el sensor de color reaccione y siga la línea según su programación. También explica que el robot puede seguir la línea a velocidad variable, retrocediendo, avanzando o en zigzag usando el sensor de color y luminosidad.


































































