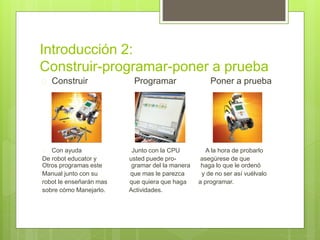
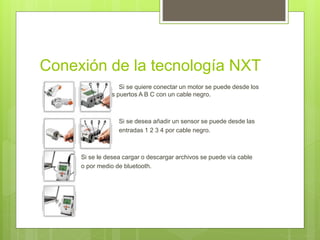
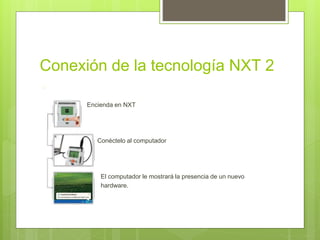
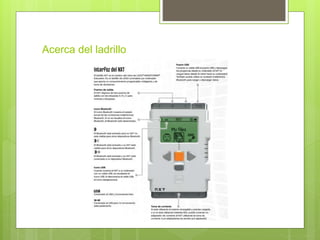
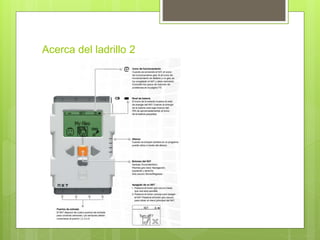
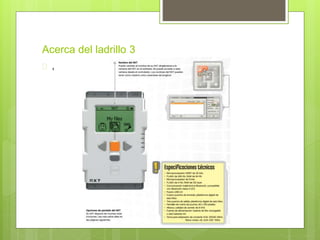
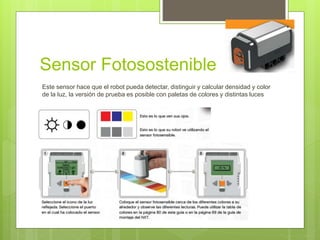
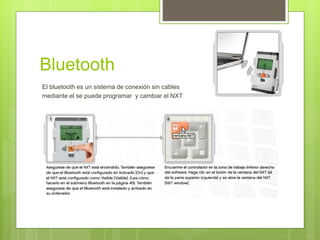
Este documento resume las características y componentes del robot educativo Lego Mindstorms NXT. Explica que el ladrillo NXT es el cerebro del robot y contiene una CPU, batería recargable y puertos para conectar sensores táctiles, acústicos, de luz y ultrasonido, así como servomotores. También describe cómo conectar el robot al computador mediante cable o Bluetooth para programarlo y probar sus funciones.