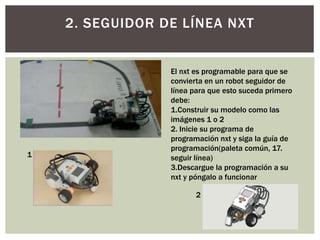
Este documento describe cómo construir y programar un robot seguidor de línea NXT. Explica que un seguidor de línea usa sensores para detectar una línea negra en el piso y dirigir el robot a lo largo de ella. Detalla los pasos para construir dos modelos de seguidor de línea NXT y programar el robot usando la paleta común de programación NXT para seguir la línea. Finalmente, la programación se descarga al robot NXT para que funcione.