Descargado 3450 veces



















































































































































![Sección I MG 1-1998, Revisión 1
GRADO DE PROT ECCIÓN Parte 5, página 9
Precauciones de seguridad adecuadas se deben tomar cuando se prueba una máquina en la condición de energía.
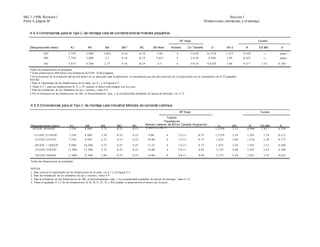
Tabla 5-4
Condiciones de ensayo para NUMERAL segunda característica
Segundo
Característica
Numeral Condiciones de prueba
0 No es necesario realizar ensayos.
1 La prueba se realiza por medio de un equipo se muestra el principio de que en la figura 3.5, la
régimen de descarga deberán ser razonablemente uniformes en toda el área de los aparatos y se
produce una precipitación de entre 3 mm y 5 mm de agua por minuto (en el caso de los equipos
de acuerdo a la Figura 3.5, esto corresponde a una caída en el nivel de agua de 3 mm a 5 mm por minuto).
La máquina durante la prueba se coloca en su posición normal de funcionamiento en el goteo
equipo, la base de que será mayor que el de la máquina durante la prueba. Excepto
máquinas diseñadas para pared o techo, el apoyo a la caja a prueba deberá
ser menor que la base de la caja.
La máquina normalmente se fijan a la pared o el techo se fija en su posición normal de uso de una madera
tablero con dimensiones que son iguales a los de la superficie de la máquina que está en
contacto con la pared o el techo cuando la máquina se monta como en uso normal.
La duración total de la prueba será de 10 minutos.
El goteo es la misma que la especificada para el segundo número característico 1 y se
ajustado para dar la misma velocidad de descarga.
2
La máquina está probada durante 2,5 minutos en cada una de las cuatro posiciones de inclinación fija. Estos
posiciones son de 15 grados a cada lado de la vertical en dos perpendiculares entre sí
aviones.
La duración de la prueba será de 10 minutos.
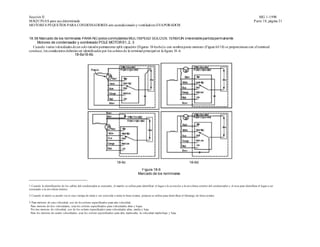
3 La prueba se efectuará utilizando el equipo como se muestra en la Figura 5.4, siempre que el
dimensiones y forma de la máquina para la prueba es tal que el radio de la oscilación
tubo no sea superior a 1 m. Si esta condición no se cumple, un pulverizador de mano,
como se muestra en la Figura 5.5, se utilizará.
a. Condiciones cuando se utiliza equipo de prueba como se muestra en la Figura 4.5.
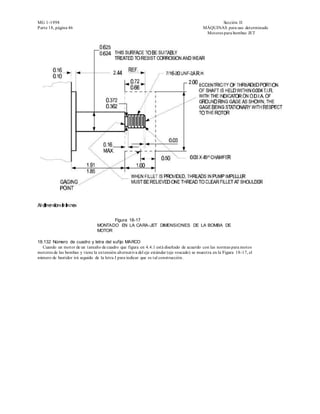
El caudal total se ajustará en un promedio de 0,1 litros / min. ± 5 por ciento por hoyo
multiplicado por el número de agujeros. El caudal total se mide con un medidor de caudal.
El tubo está provisto de orificios de pulverización en un arco de 60 grados a cada lado del punto central
y se fijarán en posición vertical, la máquina de pruebas está montada sobre una plataforma giratoria con un
eje vertical y se encuentra aproximadamente en el centro del semicírculo. El plato giratorio es
gira a una velocidad conveniente para que todas las partes de la máquina se mojan durante la prueba.
La duración mínima de prueba será de 10 minutos.
b. Condiciones cuando se utiliza equipo de prueba como en la Figura 5.5.
El escudo se mueve en su lugar para esta prueba.
La presión del agua se ajusta para obtener una tasa de ejecución de 10 0,5 litros / min. (Presión
aproximadamente 80 a 100 kPa [0.8-1.0 bar]).
2
La duración del ensayo será de 1 min por m de superficie calculada de la máquina (excluyendo
cualquier superficie de montaje) con una duración mínima de 5 minutos.
Tabla 5-4 en la página siguiente](https://image.slidesharecdn.com/normanemacompleta-130115003358-phpapp02/85/Norma-nema-completa-157-320.jpg)











































































































































































































































































































































































































































Este documento contiene una lista revisada de contenidos para las Normas NEMA MG publicación N o 1-1998, Revisión 1. Incluye una lista de secciones actualizadas y una tabla de contenidos revisada con numerosas secciones sobre clasificaciones y especificaciones para motores y generadores eléctricos.















































