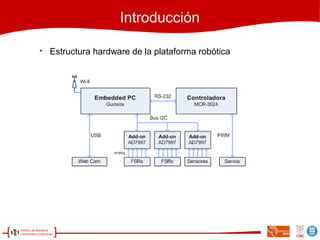
El documento presenta el diseño y desarrollo de un software para gestionar y adquirir datos de una plataforma robótica humanoide, integrando diversos sensores como infrarrojos y acelerómetros. Se expone el modelado de los sensores para evitar calibración y se detalla la estructura del software que permite monitorización remota. Se concluye con la creación de una librería que facilita la configuración de hardware y se plantean perspectivas futuras para optimizar el sistema.