Descargar para leer sin conexión






















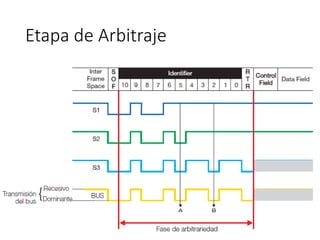


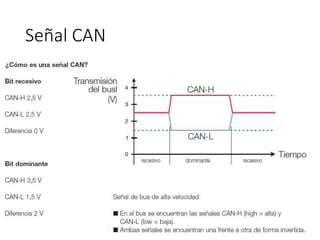





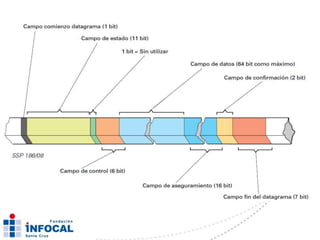



Este documento describe los componentes principales de un sistema CAN-Bus, incluyendo el controlador, transceptor, cables del bus, y resistencias terminales. Explica que el sistema funciona como un sistema multi-maestro donde cualquier nodo puede iniciar una transmisión y que utiliza un proceso de arbitraje para determinar la prioridad cuando hay colisiones. También describe brevemente el protocolo de enlace de datos utilizado para la transmisión.







![E:\Vilma[1] [Reparado]](https://cdn.slidesharecdn.com/ss_thumbnails/evilma1reparado-100812100556-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)








































































