Descargar para leer sin conexión


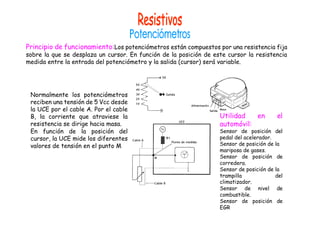
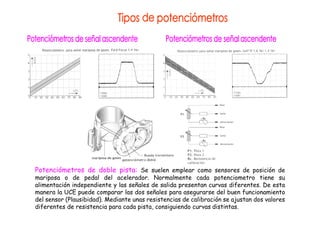
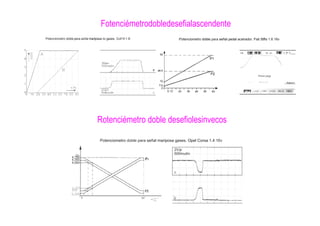
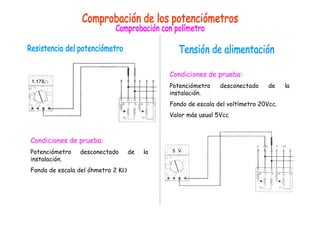








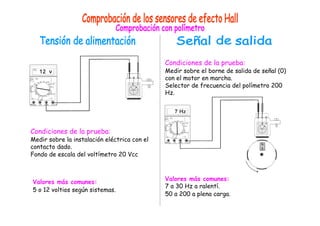
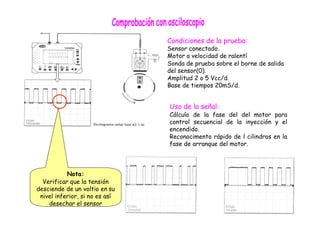

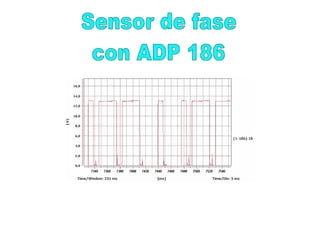
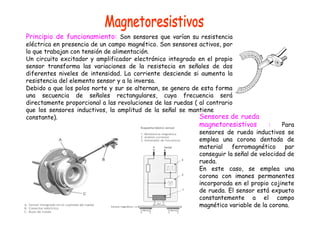








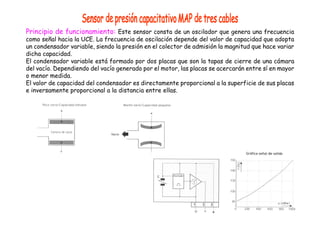

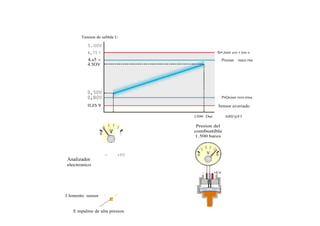
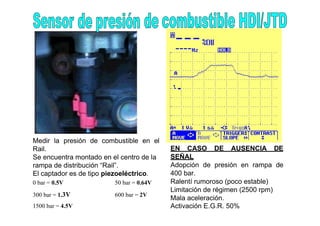
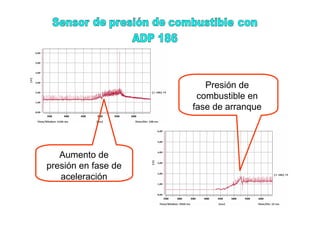
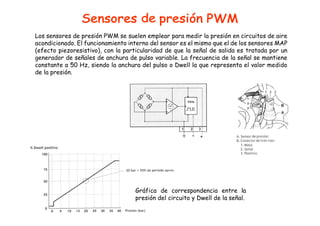








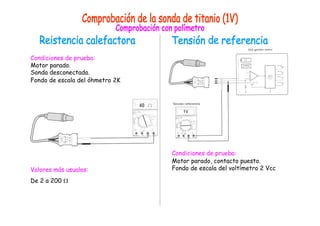





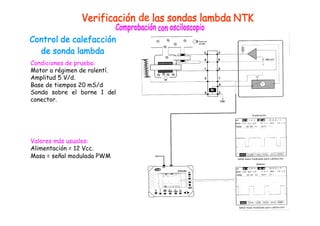
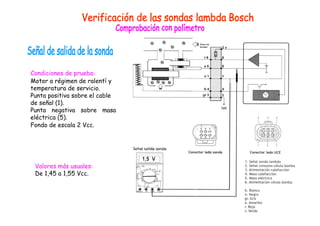
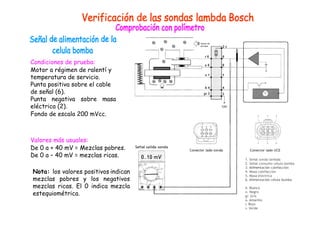
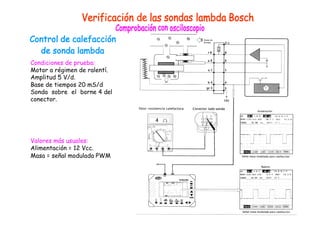



Este documento describe diferentes tipos de sensores utilizados en automóviles, incluyendo sensores resistivos como potenciómetros y sondas de temperatura, sensores inductivos como los pasivos y activos, sensores de efecto Hall, magnetorresistivos, de masa de aire, presión, detonación y oxígeno. Explica sus principios de funcionamiento y aplicaciones comunes en vehículos.















































