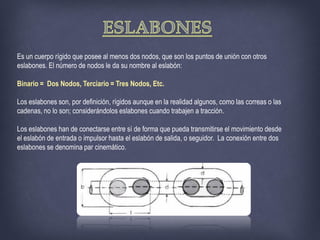
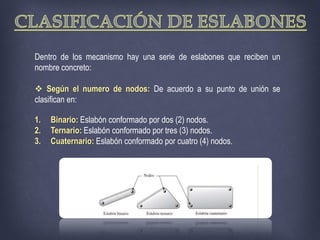
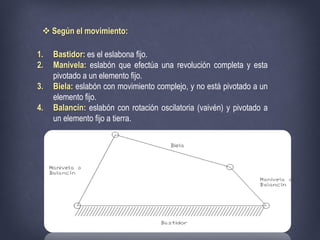
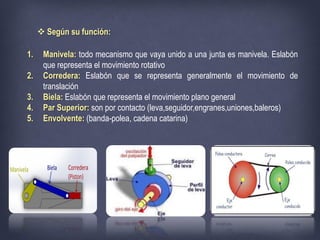
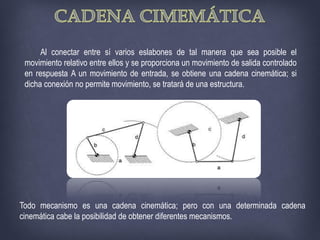
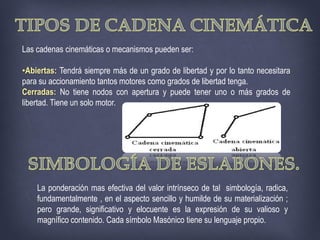
El documento habla sobre los diferentes tipos de eslabones en los mecanismos. Explica que los eslabones se clasifican según el número de nodos (binario, ternario, etc.), según el movimiento (manivela, biela, balancín), y según su función (manivela, corredera, biela). También describe los pares cinemáticos que conectan los eslabones y cómo al conectar varios eslabones se forma una cadena cinemática o mecanismo.