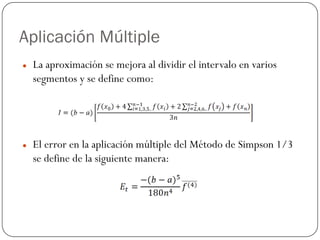
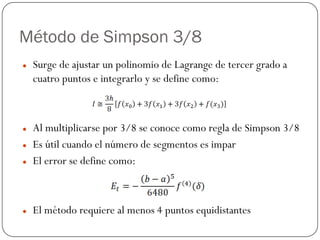
Los métodos de Newton-Cotes, como la regla del trapecio, Simpson 1/3 y Simpson 3/8, se utilizan para aproximar integrales numéricamente mediante el reemplazo de funciones por polinomios. Estos métodos dividen el intervalo de integración en segmentos y aplican fórmulas polinomiales en cada segmento, sumando los resultados para aproximar la integral total. Los métodos de Simpson son más precisos al usar polinomios de grado superior.