Descargado 51 veces
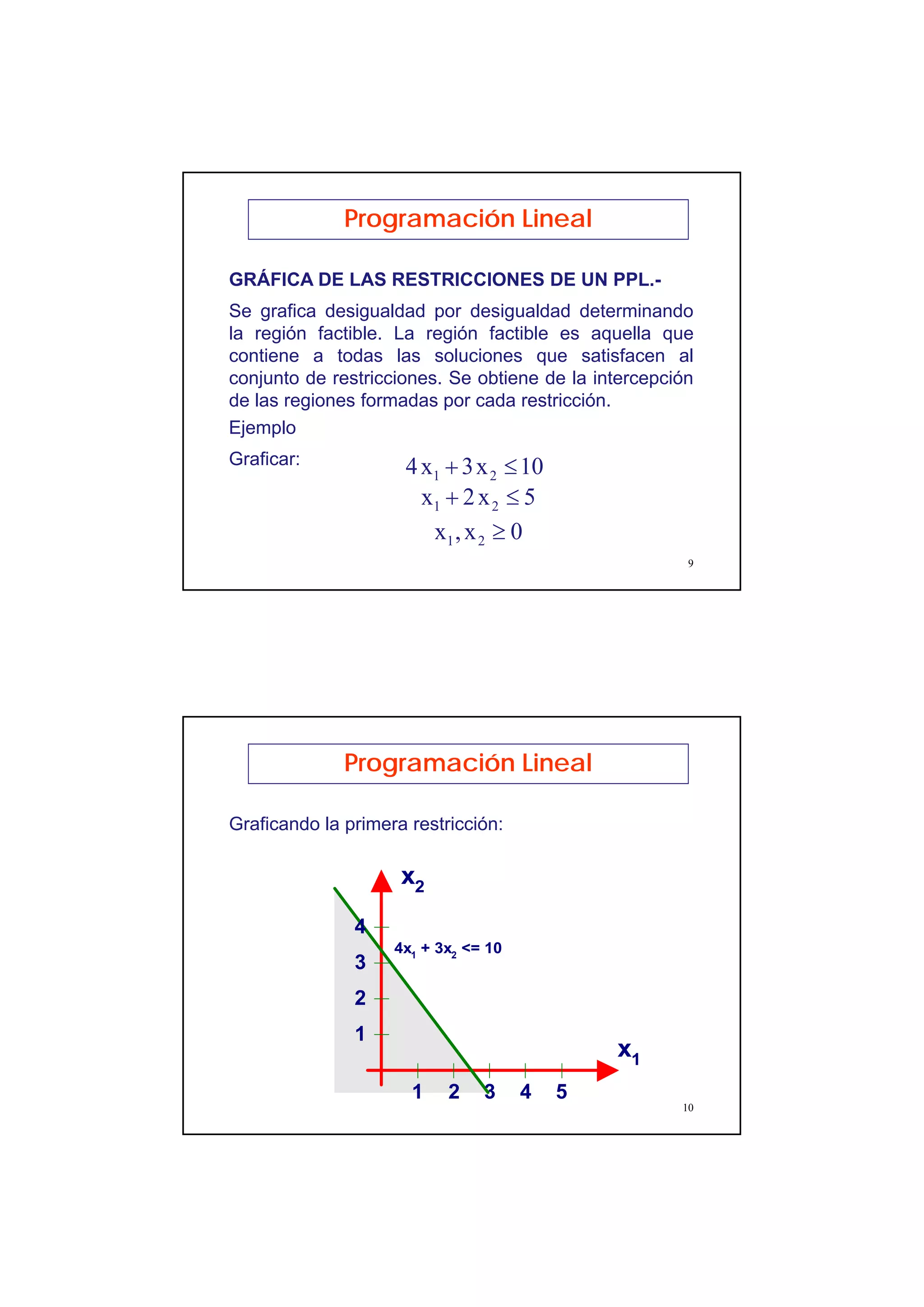
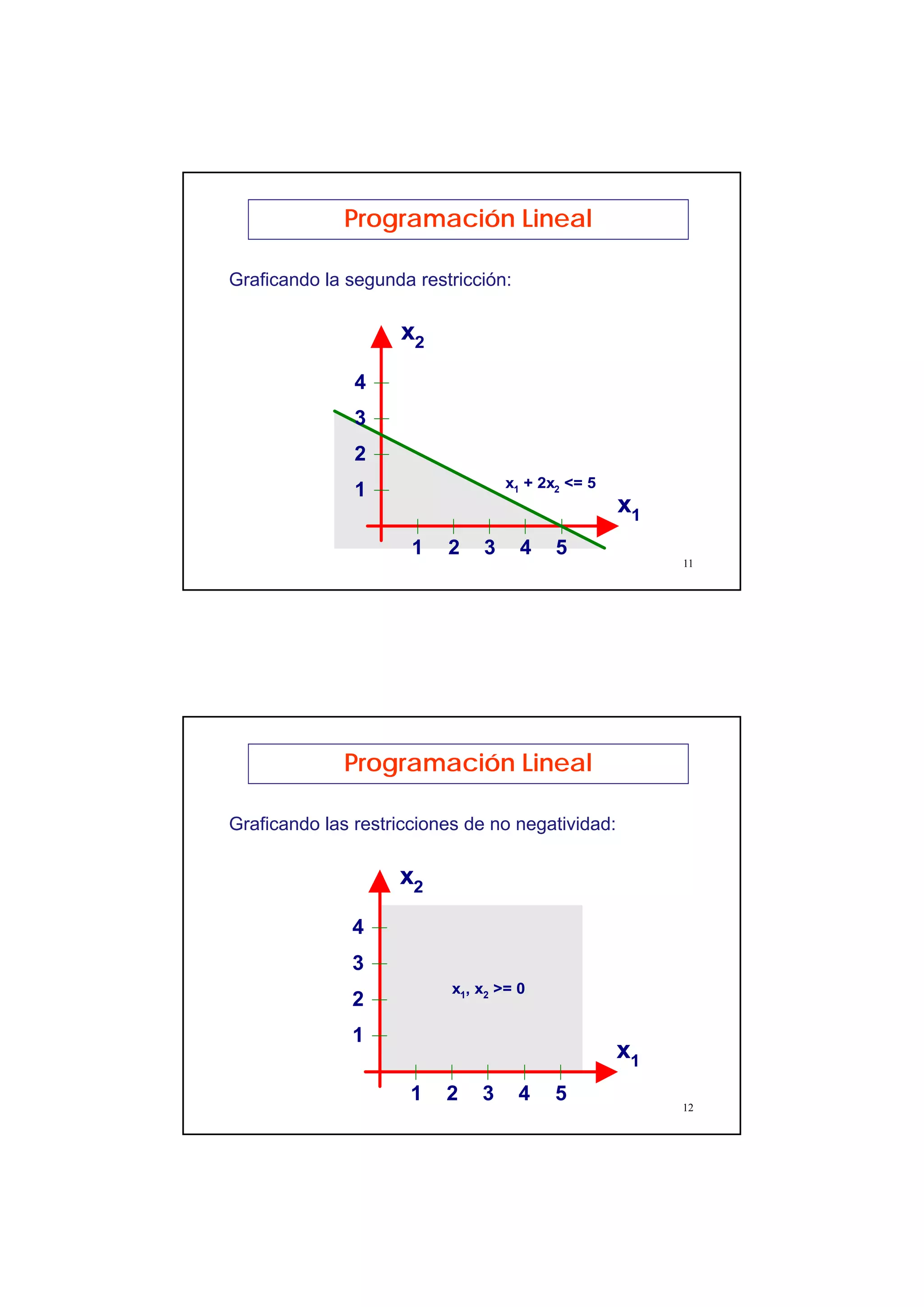
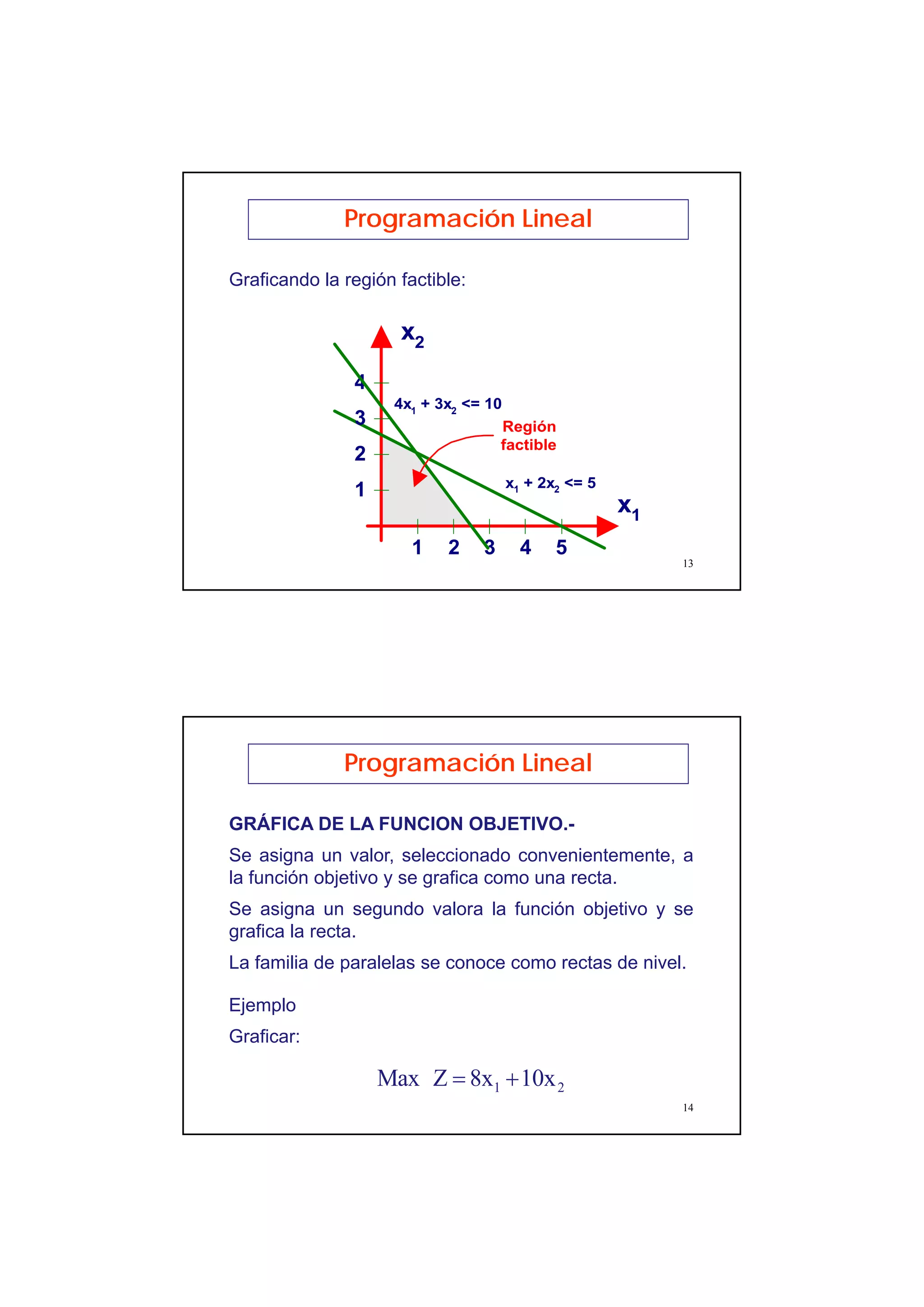
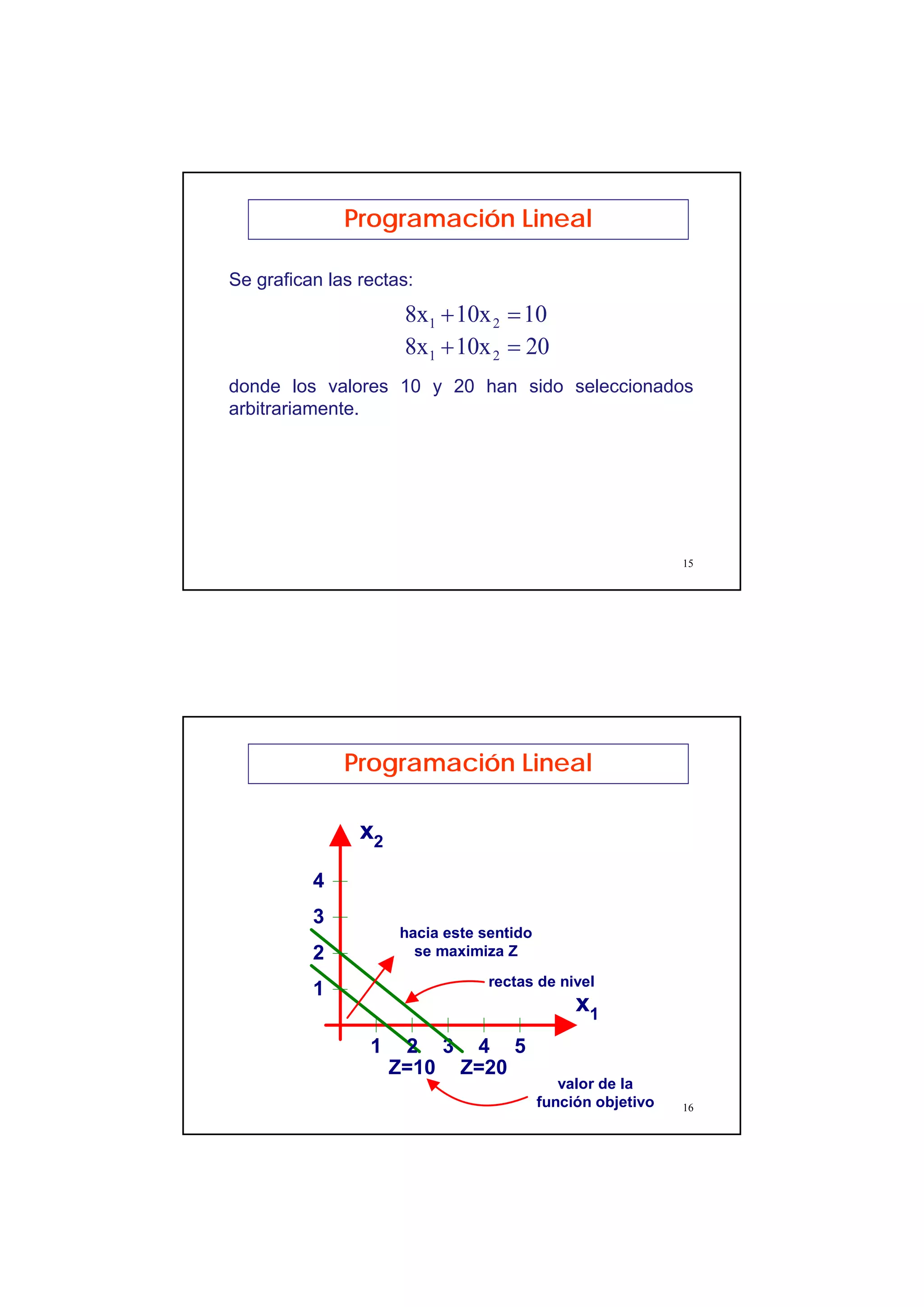
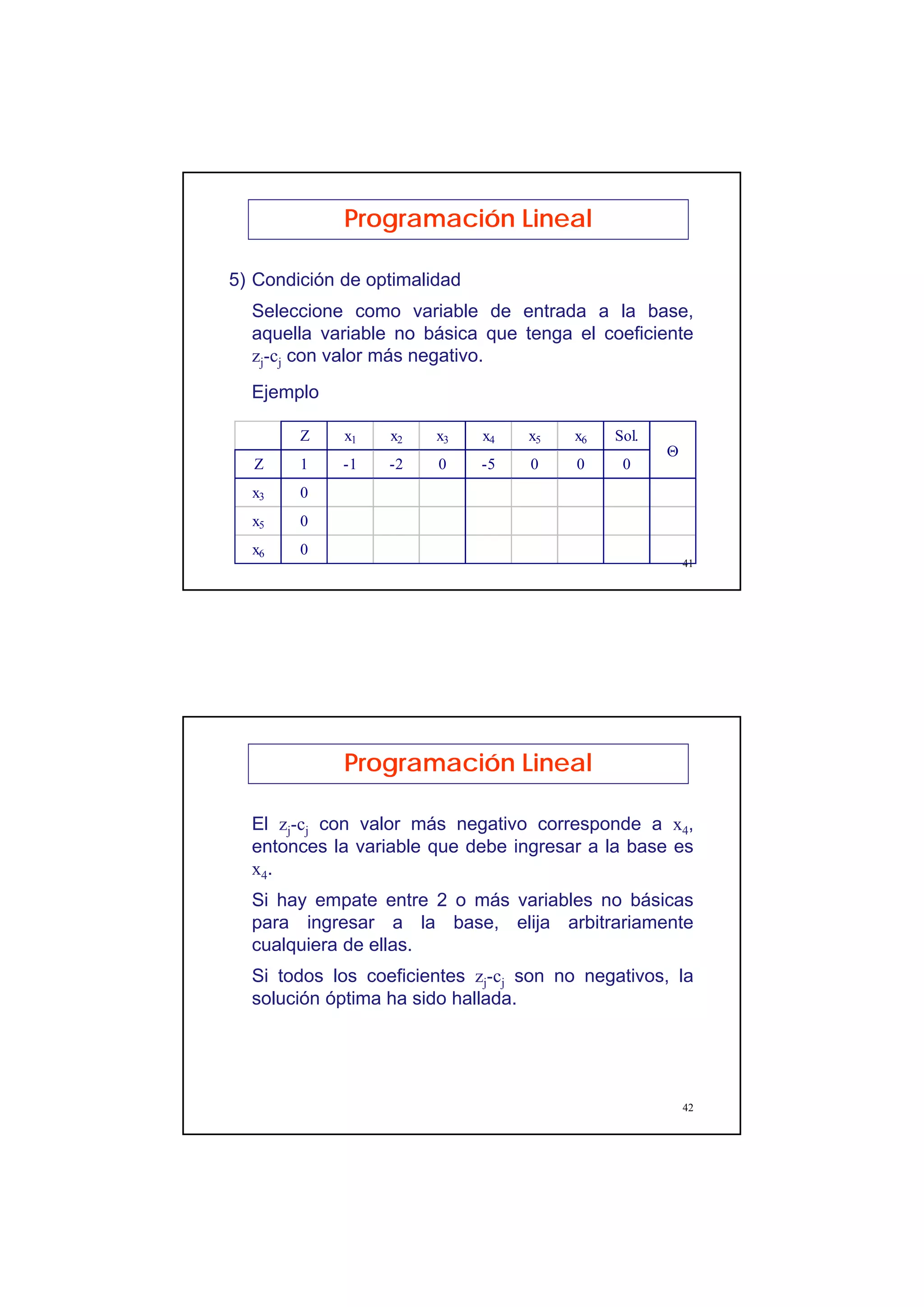
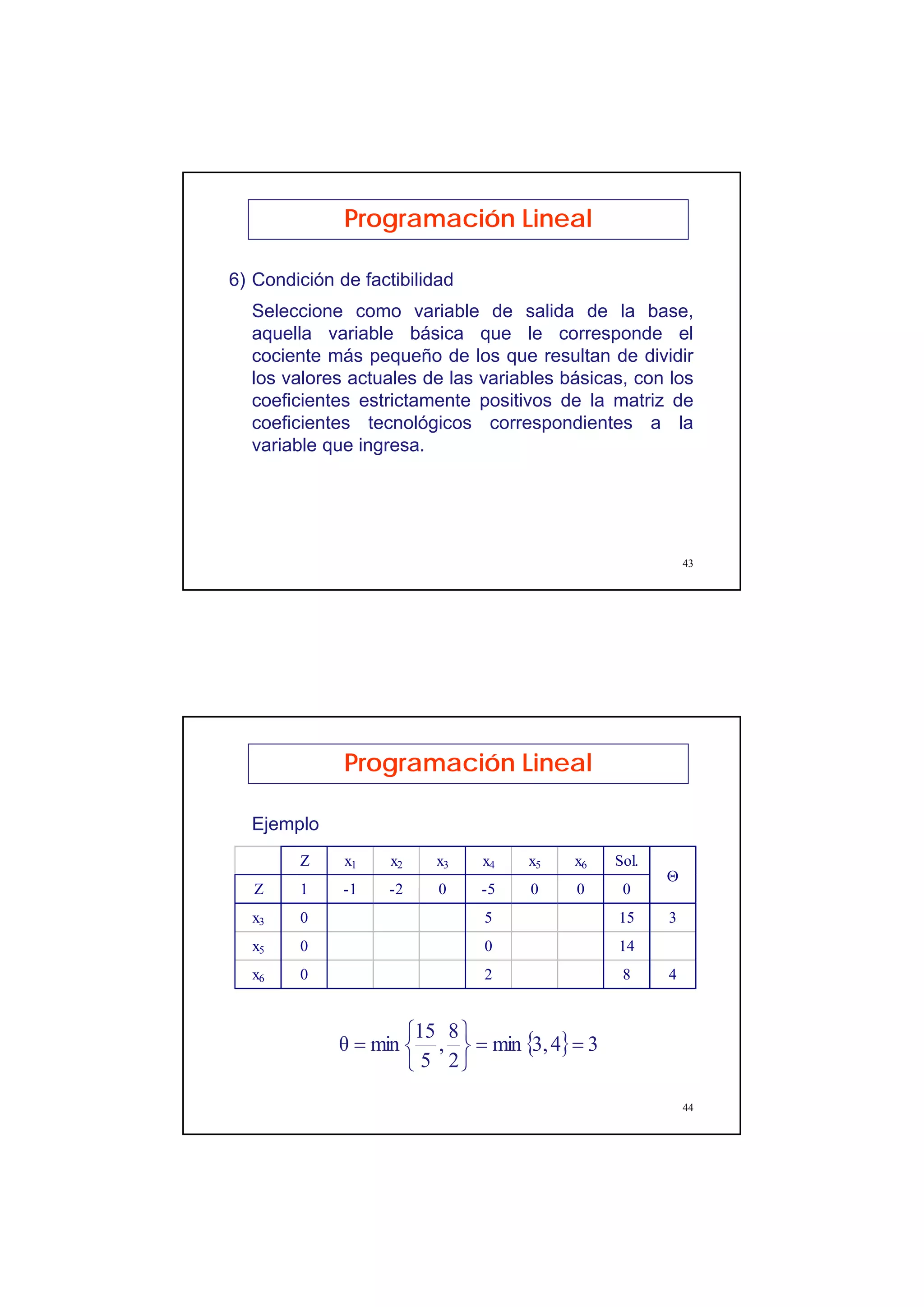
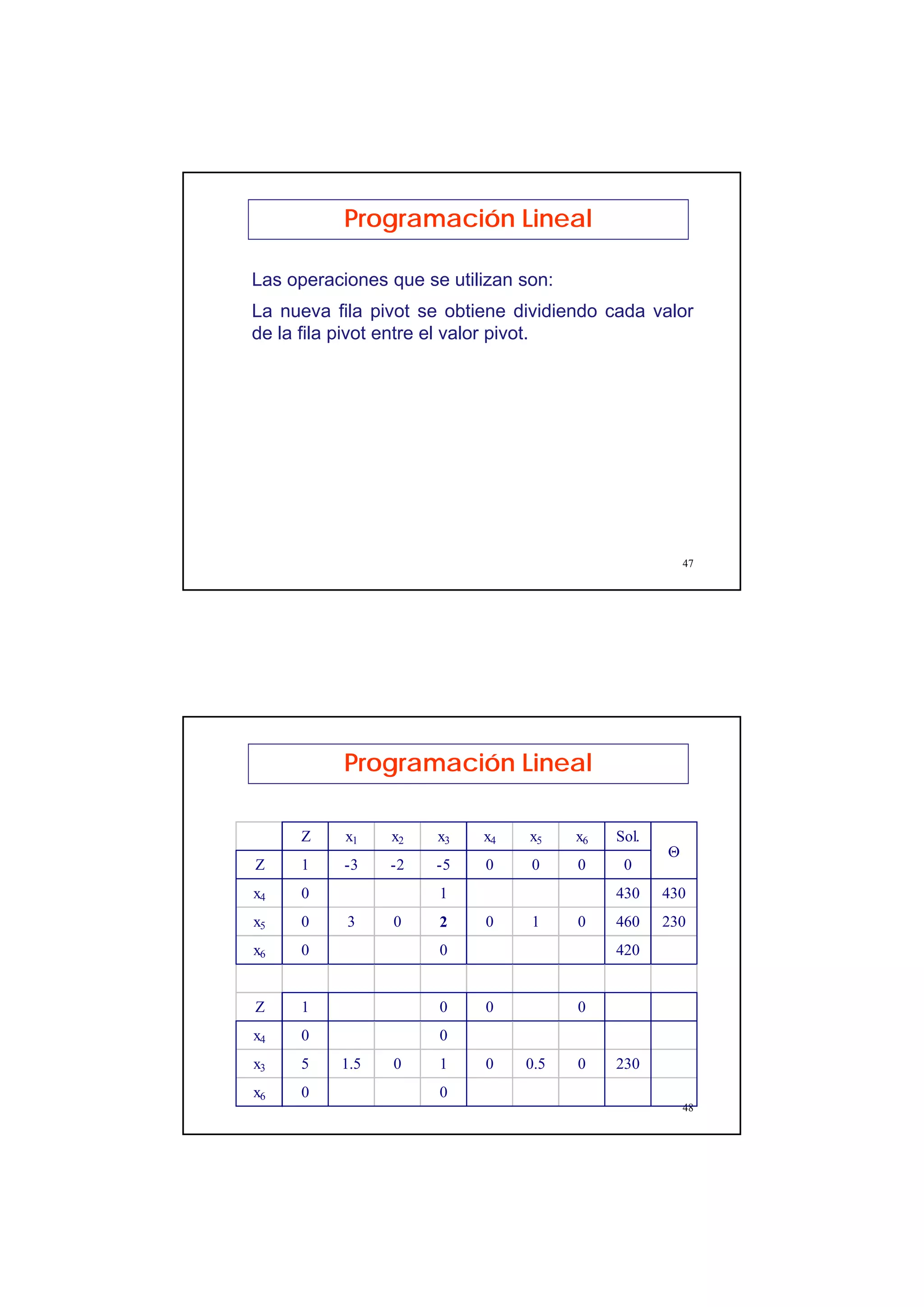
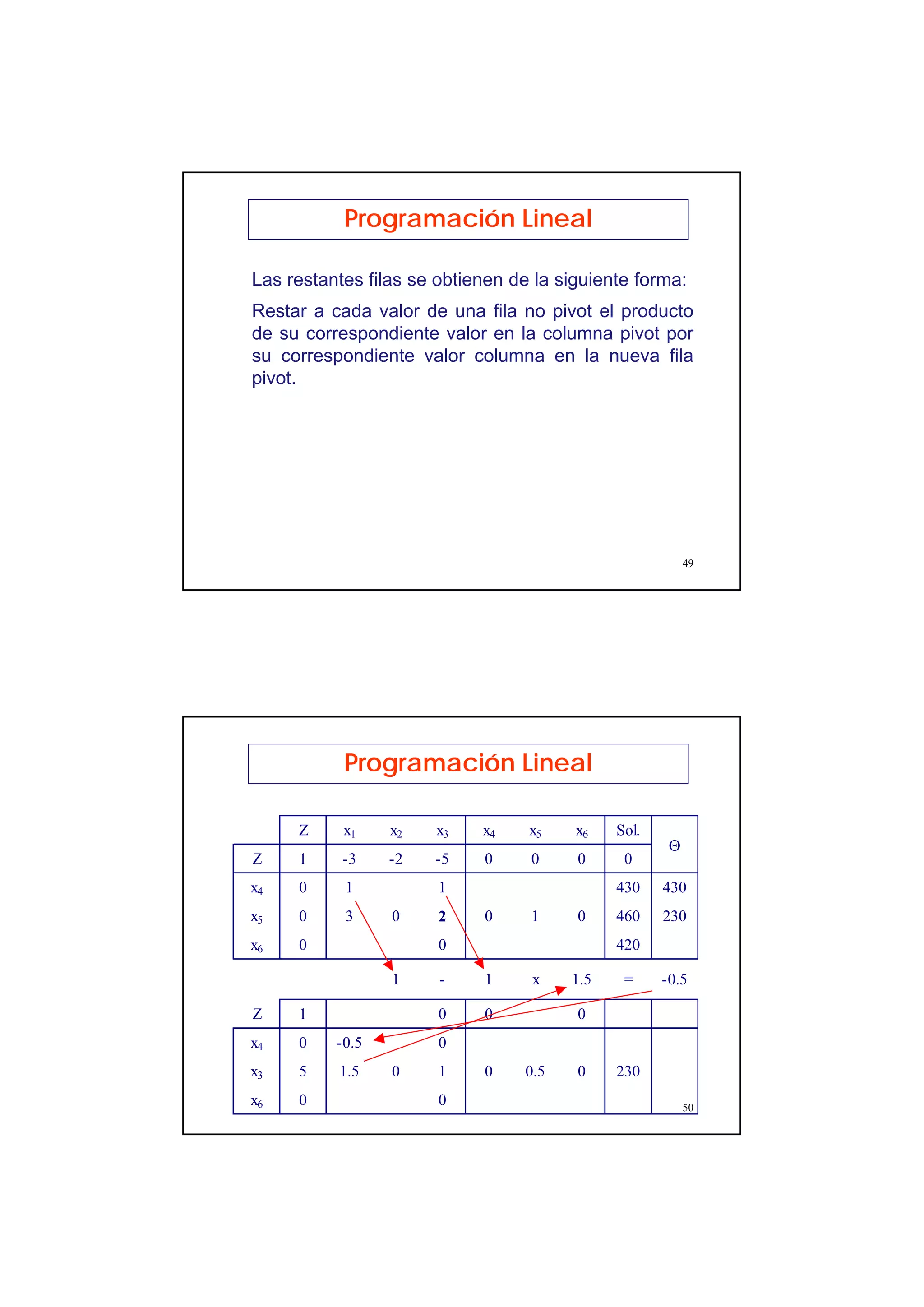
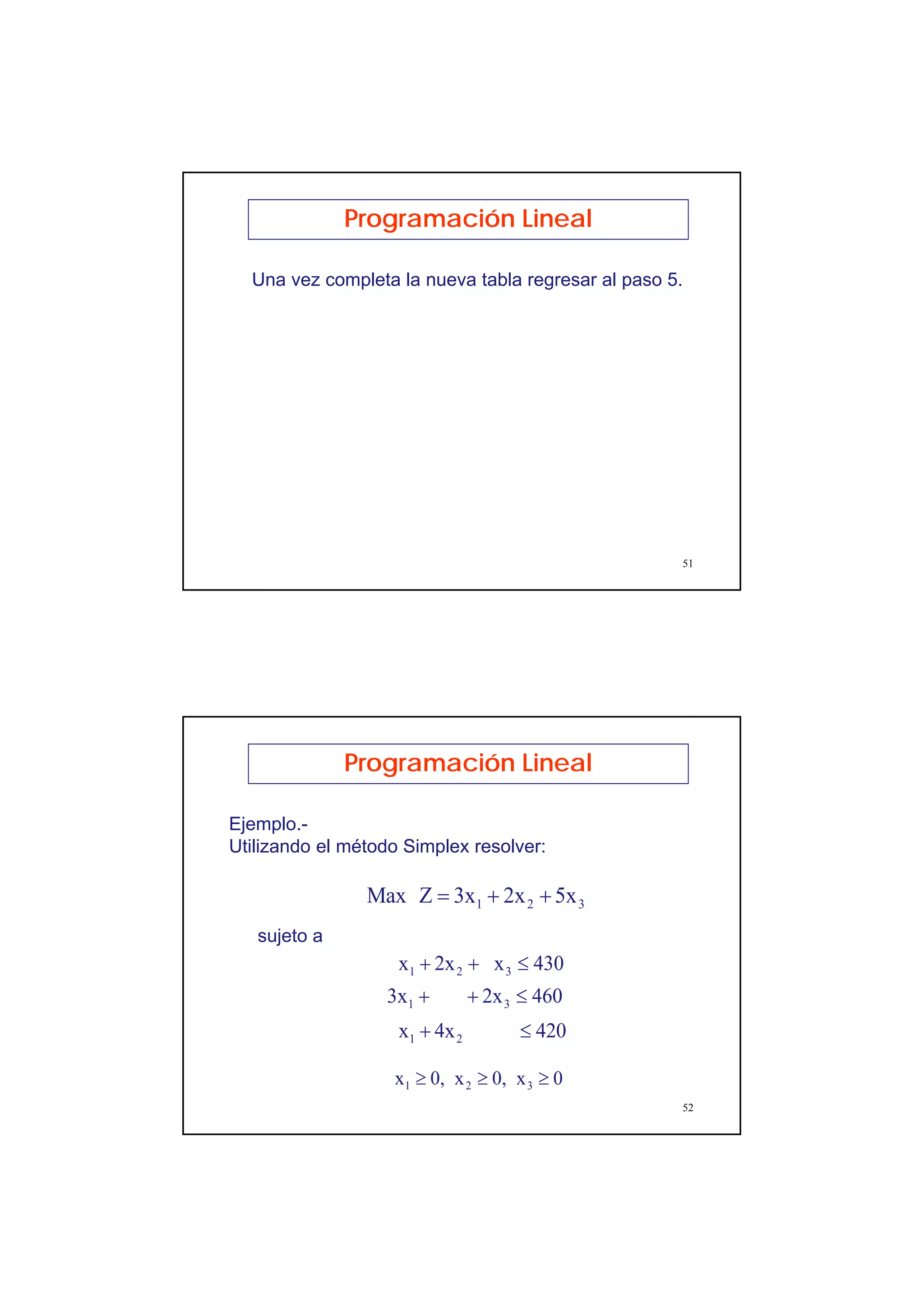
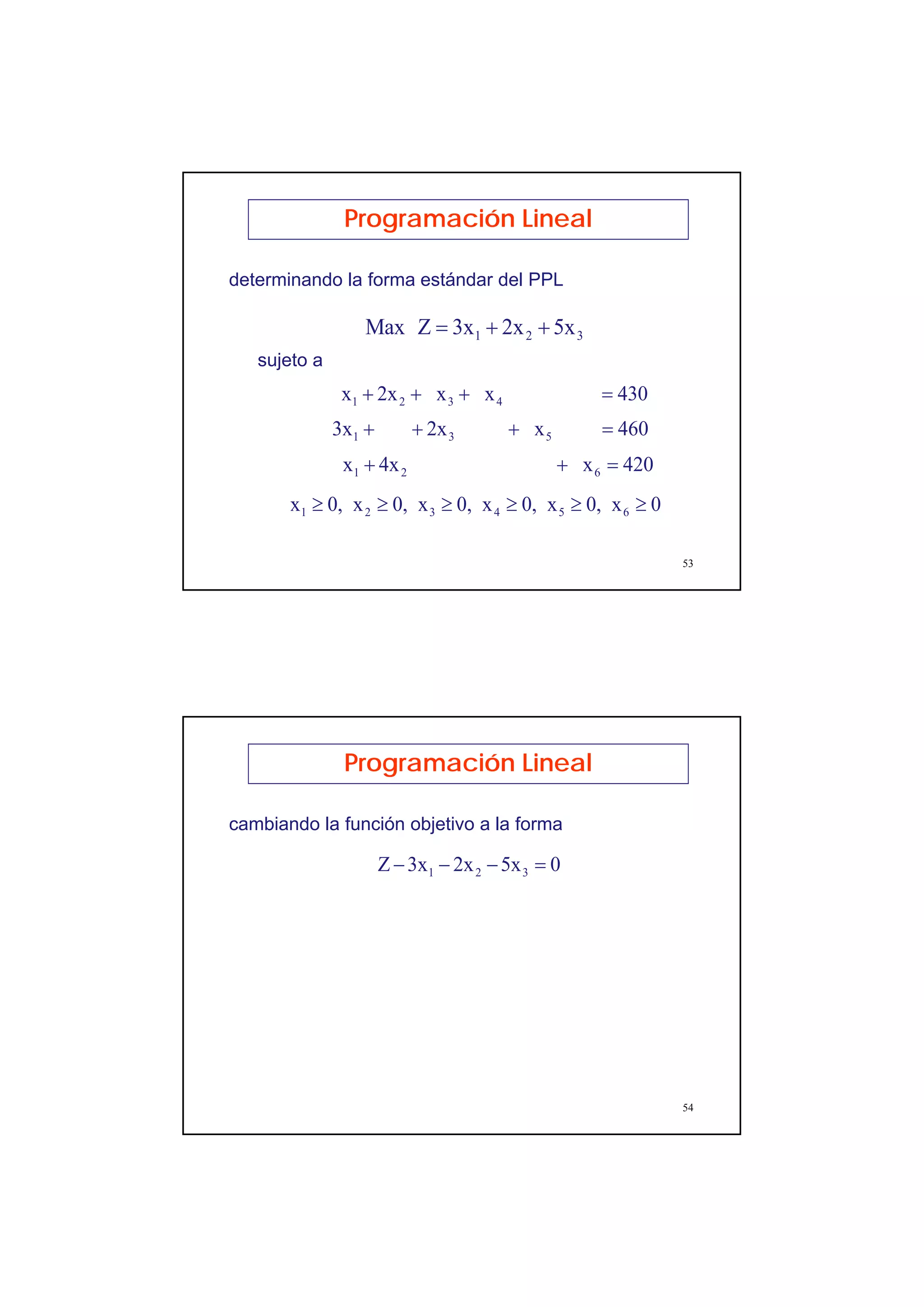
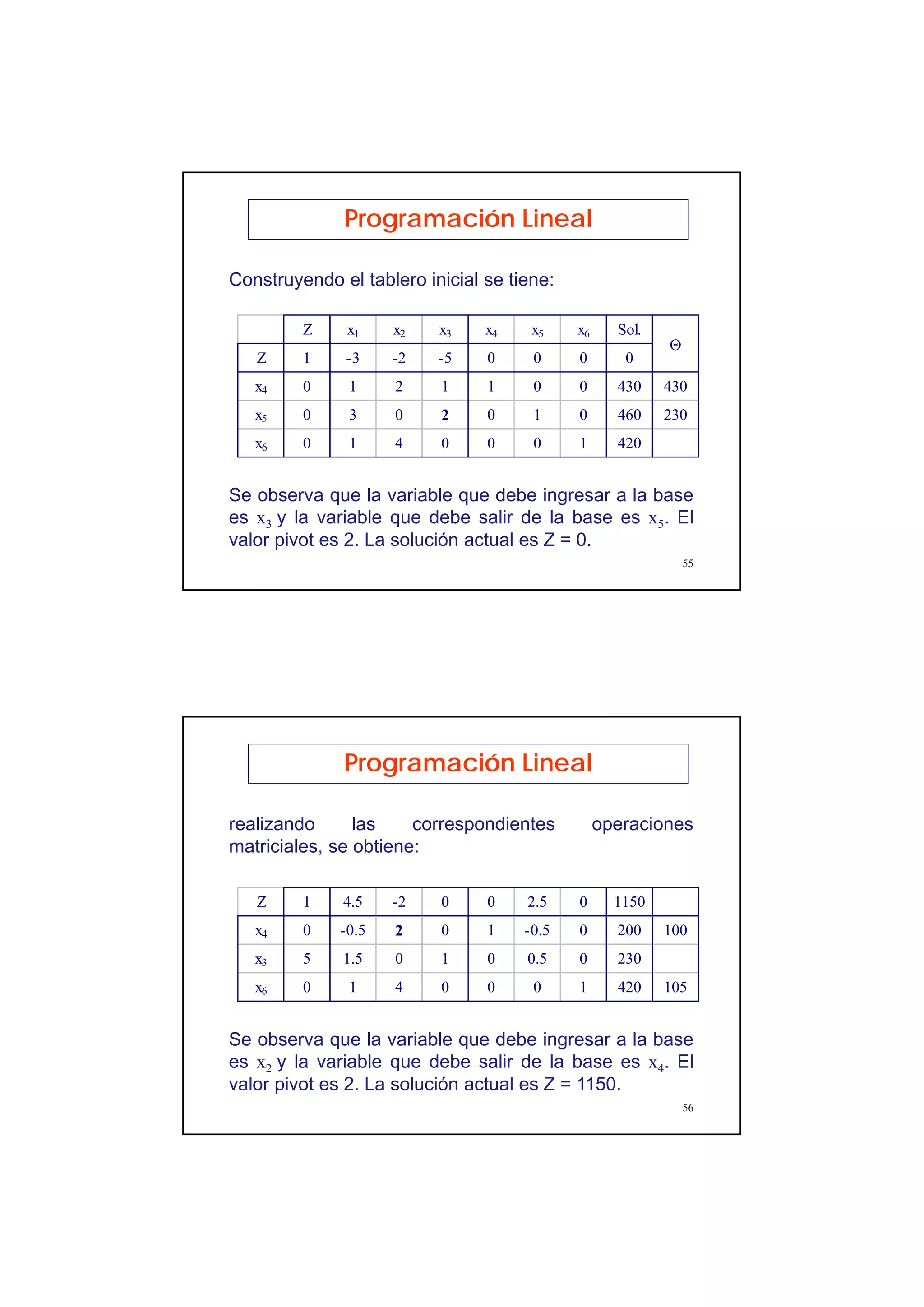
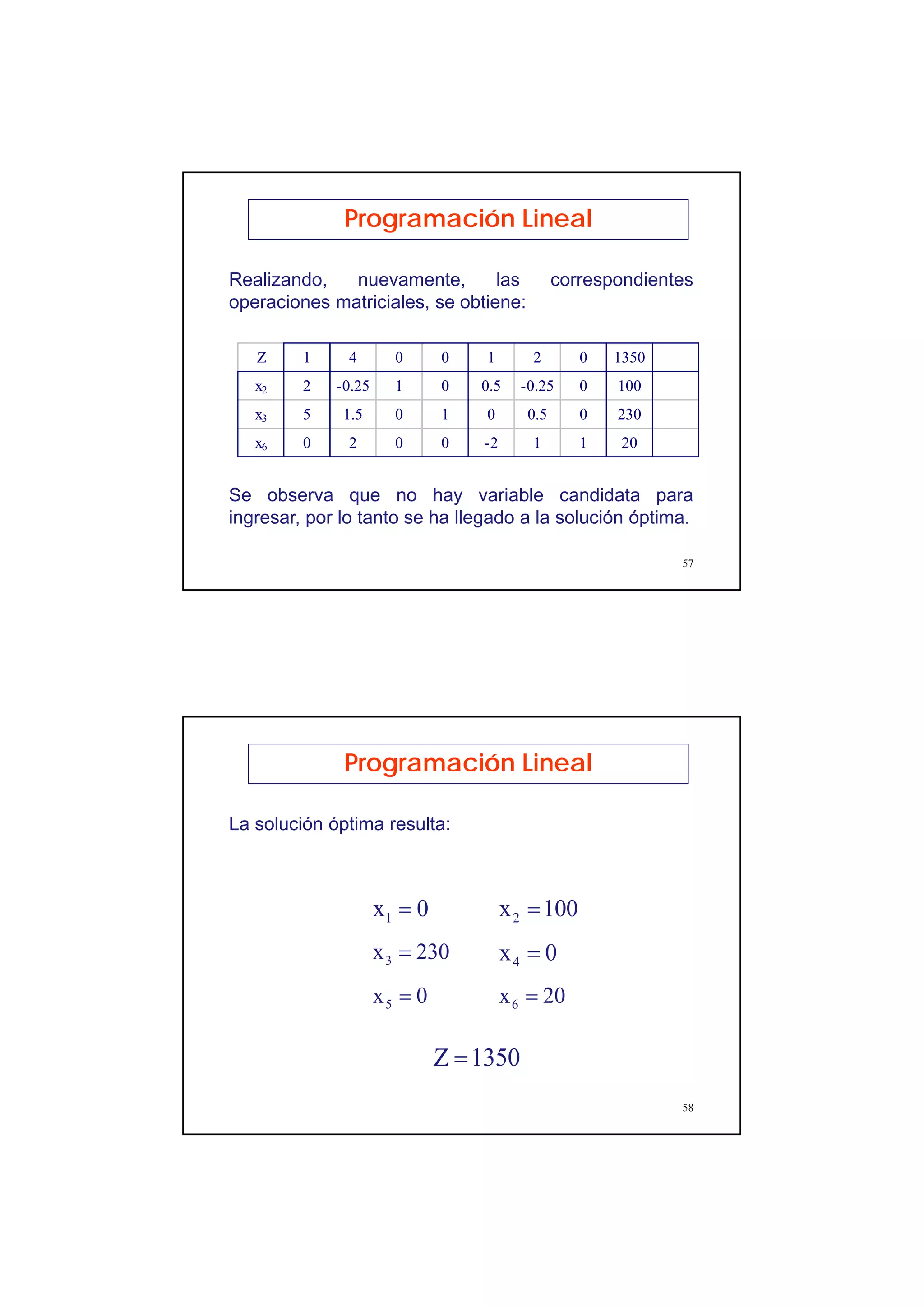
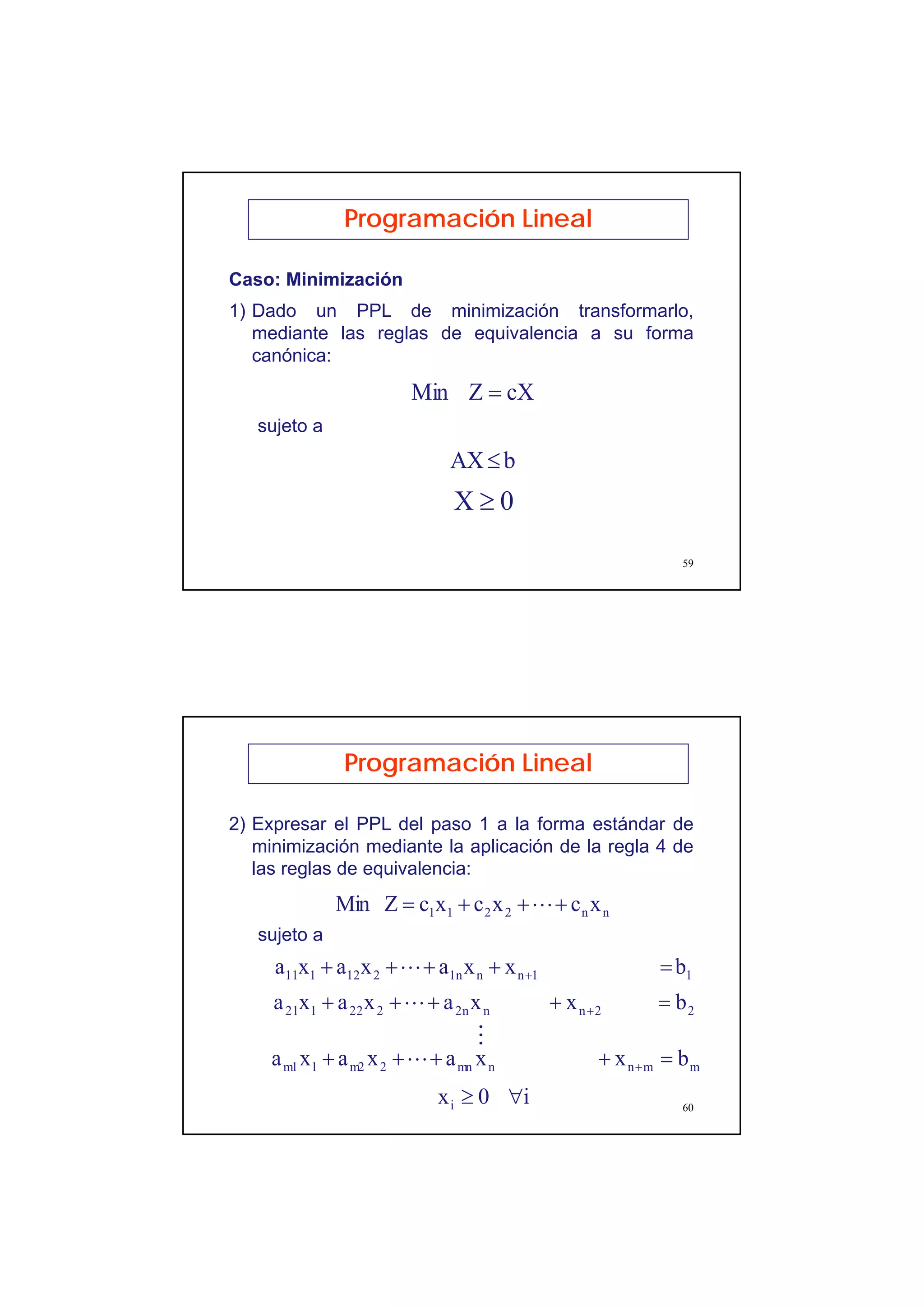
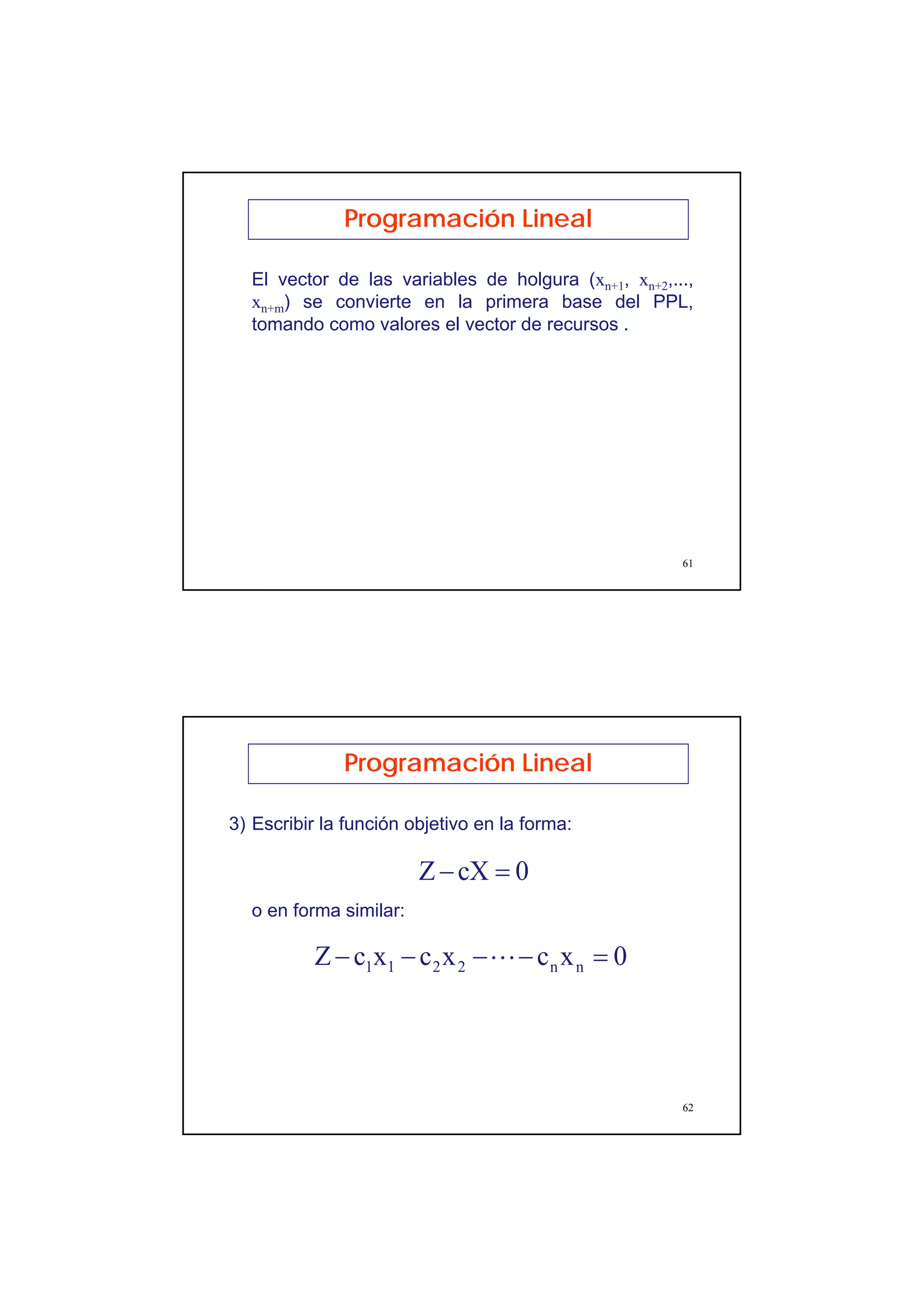
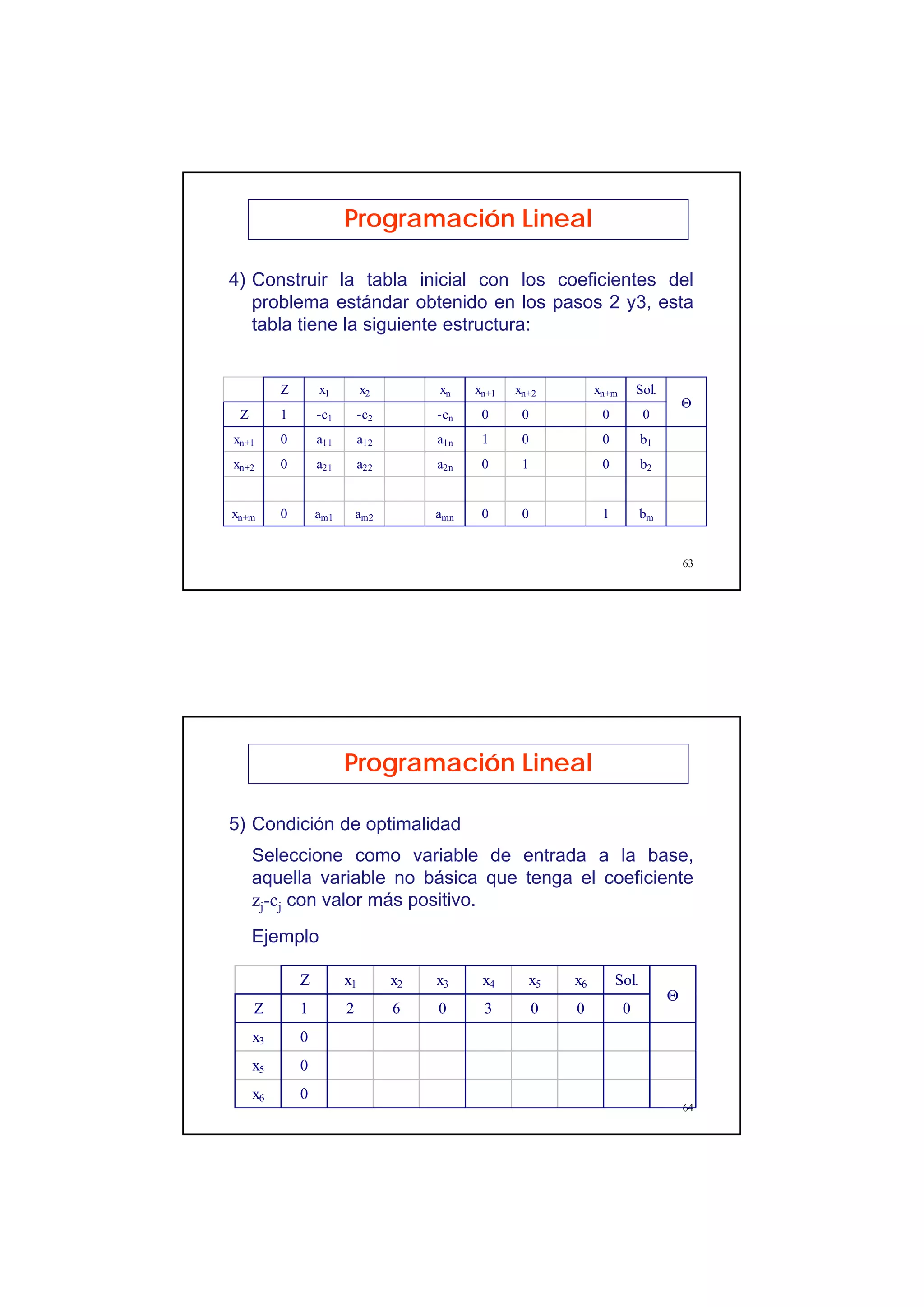
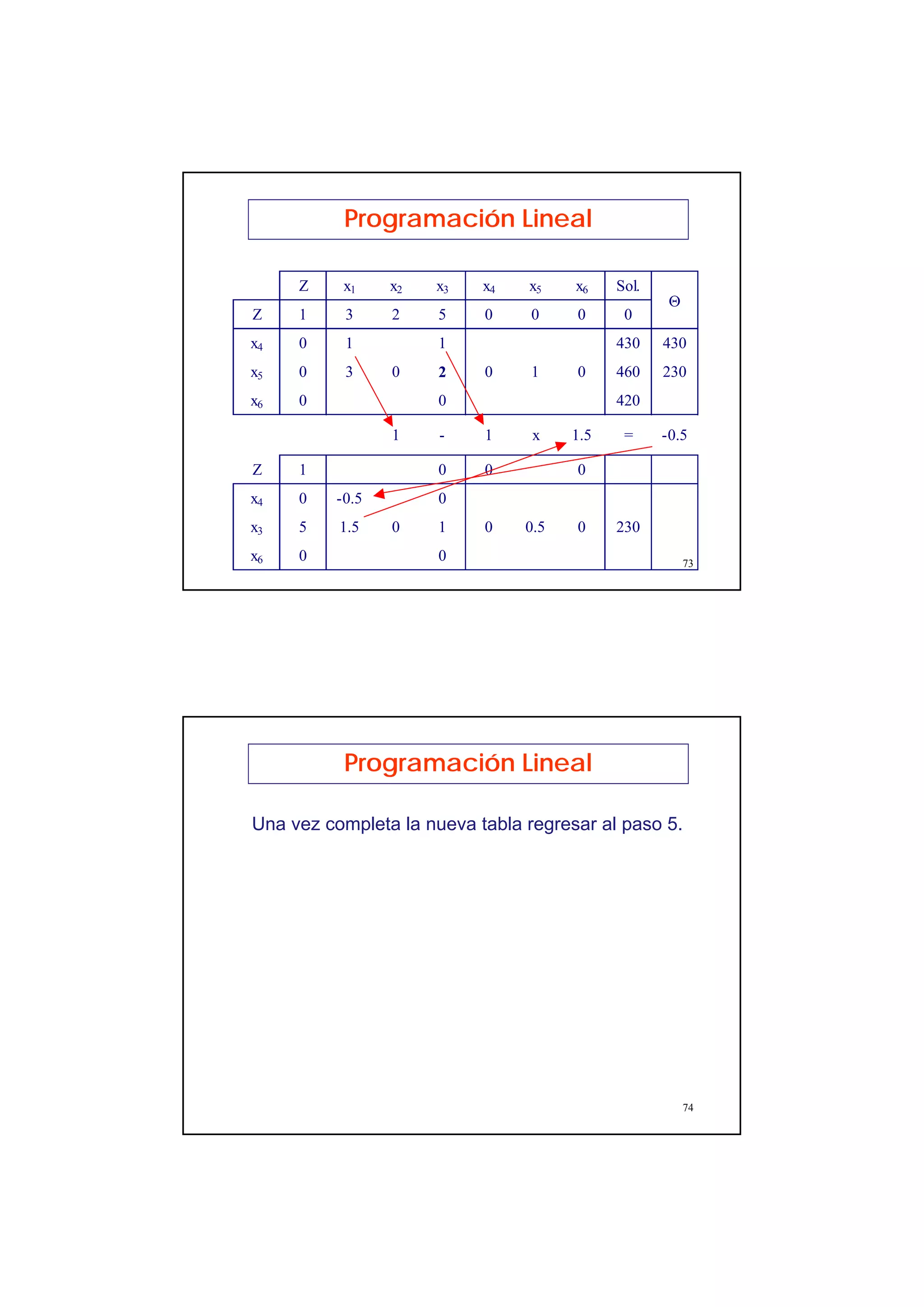
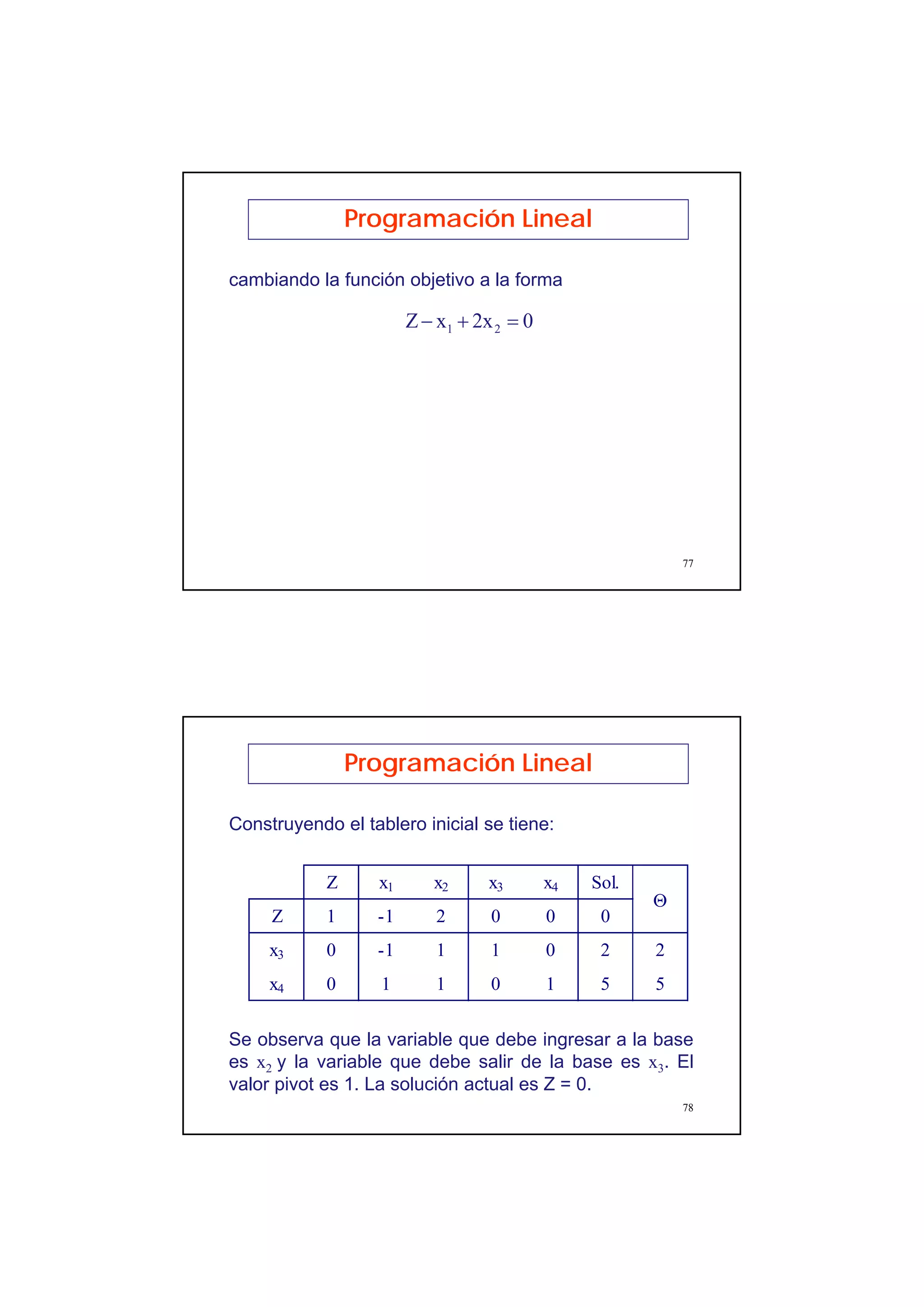
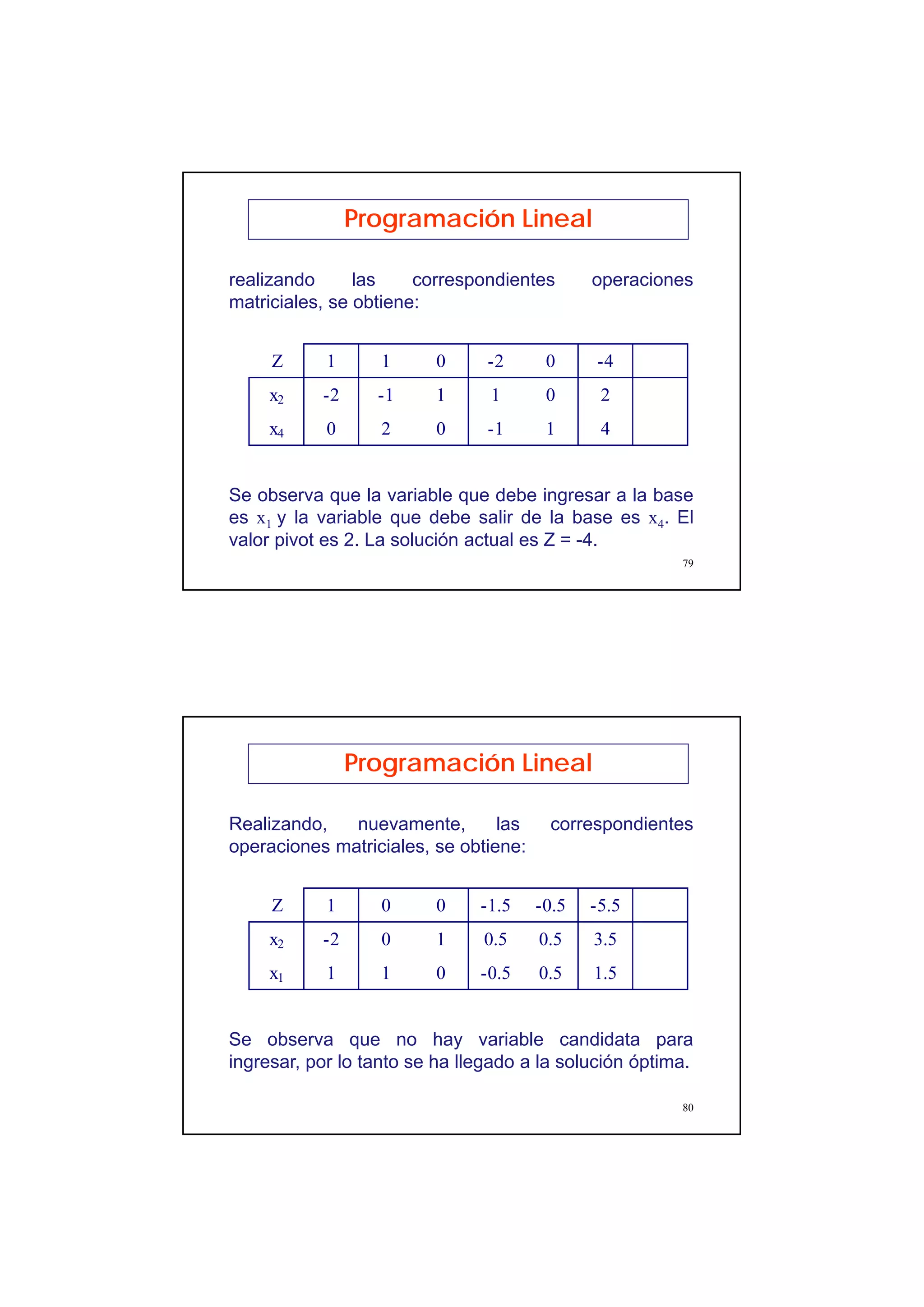

El documento describe el método gráfico y el método simplex para resolver problemas de programación lineal. El método gráfico involucra graficar las restricciones y la función objetivo para determinar la región factible y la solución óptima. El método simplex transforma el problema a una forma estándar y usa tablas y pivotes para iterativamente encontrar la solución óptima. El documento también presenta el software GLP para graficar problemas de programación lineal de dos variables.























































































