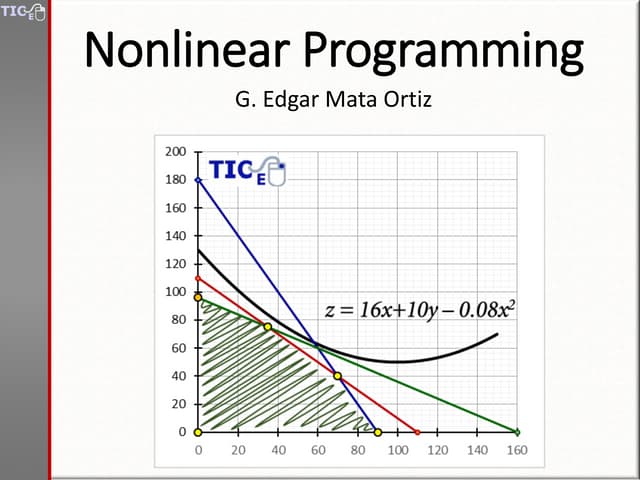
Este documento resume varios métodos de programación no lineal como la programación cuadrática, dinámica, separable, geométrica y estocástica. Explica que la programación no lineal involucra maximizar o minimizar funciones no lineales sujetas a restricciones, y que los métodos utilizan conceptos como gradientes y condiciones de Karush-Kuhn-Tucker. También describe brevemente cada tipo de problema no lineal.