
Recomendados
Más contenido relacionado
Similar a Matemáticas - Física de vectores para ingenieros
Similar a Matemáticas - Física de vectores para ingenieros (20)
Último
Último (20)
Matemáticas - Física de vectores para ingenieros
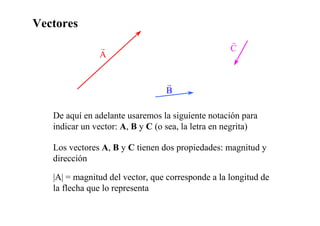
- 1. Vectores A B C De aquí en adelante usaremos la siguiente notación para indicar un vector: A, B y C (o sea, la letra en negrita) Los vectores A, B y C tienen dos propiedades: magnitud y dirección |A| = magnitud del vector, que corresponde a la longitud de la flecha que lo representa
- 2. Suma de vectores A B A + B = C C A B C B + A = C
- 3. A B A B A + B = C A + B = 0 A B C A+B+C A+C+B B+A+C B+C+A C+A+B C+B+A Combinaciones posibles A B C D A B C D A B C D
- 4. Resta de vectores A B A - B = C C A -B C A -B -B
- 5. Multiplicación de un vector por un escalar ( ) ¿Qué vectores y escalares físicos conocemos? temperatura viento corriente marina presión atmosférica lluvia
- 6. Multiplicación de un vector por un escalar A 2A 2A = A+A Multiplicamos el vector A por 2
- 7. x y x y r(t) = x(t) + y(t)ĵ î v e c t o r Este es un vector que tiene 2 componentes: Una en el eje x y otra en el eje y ĵ î Vectores unitarios (tienen magnitud igual a 1) que indican la dirección y sentido de la componente. y Notación vectorial (muy útil)
- 8. Es claro para ustedes que los ejes x e y son perpendiculares? ( ) O sea, son ortogonales ĵ î y α x y î ĵ ¿Cuánto vale α?
- 9. x y r y ĵ xî |r|2 = x2 + y2 Magnitud o módulo del vector r α x = |r| cos α y = |r| sen α tan α = y / x OBS: en el caso del vector desplazamiento la partícula está ahora en la punta de la flecha
- 10. x y δr ri rf Vector desplazamiento ∆r Movimiento en dos dimensiones ∆r = rf - ri -ri
- 11. x y ∆r = rf - ri ri -2 3 rf 4 5 ri 3î 2 ĵ = - rf 5î 4 ĵ = + Sólo se suman o restan los valores (longitudes) de un mismo eje ∆r = (5 - 3) + (4 + 2) î ĵ ∆r = 2 + 6 î ĵ ∆r 2 6
- 12. Velocidad media en 2D ∆r ∆t = Vector desplazamiento Intervalo de tiempo = ∆r = (xf – xi ) + (yf – yi) ĵ î ∆y ĵ ∆xî ∆r = + Entonces la velocidad media puede escribirse como: ∆r ∆t = ∆y ĵ ∆xî + ∆t ∆t = v v
- 13. = ∆x ∆t = vy ∆y ∆t vx Notemos que En general = v ĵ î vx vy + Todo lo que vimos en movimiento rectilíneo (1D) se cumple en el caso 2D... por componente! En el caso del vector velocidad, ahora tiene rapidez (magnitud) y dirección. ,
- 14. x y 2. Necesitamos un sistema de referencia Representación de una pista de carrera 1. Un auto recorre la pista con una rapidez uniforme de 30 m s-1 3. Calcular la velocidad instantánea en las posiciones 1, 2, 3 y 4 1 2 3 4
- 15. x y 3. Calcular la velocidad instantánea en las posiciones 1, 2, 3 y 4 = v ĵ î vx vy + pistas: i) como la velocidad del auto es uniforme, su velocidad media e instantánea son iguales. ii) la velocidad instantánea es tangente a la trayectoria del auto. 1 En 1: = v 30 m s-1 ĵ = v -30 m s-1 ĵ En 2: 2 En 3: 3 En 4: 4 = v -30 m s-1 î = v 30 m s-1 î
- 16. x y 4. Si el auto tarda 40 s en ir entre 1 y 3, cuya separación es de 300 m, ¿cuál será su rapidez media durante este intervalo? 1 2 3 4 300 m 500 m r1 0î 0 ĵ = + r2 150 î 500ˆj = + r3 300 î 0 ˆ j = + r4 150 î 500ˆj = - 1 punto
- 17. r1 0î 0 ĵ = + r2 150 î 500ˆj = + r3 300 î 0 ˆ j = + r4 150 î 500ˆj = - = ∆x ∆t = vy ∆y ∆t vx ii. Podemos calcular también la velocidad en cada componente 300 m 40 s = = 7.5 m s-1 0 m 40 s = = 0 m s-1 Luego = v ĵ î vx vy + = v ĵ î 7.5 0 + m s-1 Entre 1 y 3 se movió con una rapidez media de 7.5 m s-1 ∆r = (xf – xi ) + (yf – yi) ĵ î i. Calculemos el desplazamiento: |r|2 = x2 + y2 ∆r = (300–0) + (0 – 0) ĵ î ∆x ∆y pero 2 2 300 0 + |r| = = 300 m |∆r| ∆t = |v| 300 m 40 s = = 7.5 m s-1
- 18. 5. ¿y la velocidad media entre 1 y 2? ∆t=20 s r1 0î 0 ĵ = + r2 150 î 500ˆj = + r3 300 î 0 ˆ j = + r4 150 î 500ˆj = - ∆r = (150–0) + (500 – 0) ĵ î ∆x ∆y = ∆x ∆t = vy ∆y ∆t vx 300 m 20 s = = 15 m s-1 500 m 20 s = = 25 m s-1 Luego = v ĵ î vx vy + = v ĵ î 15 25 + m s-1 |v|2 = vx 2 + vy 2 También se cumple que |v| = 29.1 m s-1
- 19. Aceleración en 2D En notación vectorial la aceleración de un vector se escribe como: = a En general = a ĵ î ax ay + = ∆vx ∆t = ay ∆vy ∆t ax (vfx – vix ) (vfy – viy) ˆj î ∆t ∆t + ∆v ∆t = a donde ,
- 20. x y 1 3 ¿Calcular la aceleración entre 1 y 3? ∆t ∆t = v1 30 m s-1 ĵ = v3 -30 m s-1 ĵ = a (vfx - vix ) (vfy - viy) ˆj î + ∆t = 40 s = a (0 - 0 ) (-30 - 30) ˆj î ∆t ∆t + 0 - 60 m s-1 40 s î ˆj = a 0 - 1.5 m s-2 î ˆj = a
- 21. x y 1 3 ¿Calcular la aceleración entre 1 y 3? 0 - 1.5 m s-2 î ˆj = a Por lo tanto, la aceleración media entre 1 y 3 es de –1.5 m s-2 y se dirige en - (hacia abajo en la figura) ˆj Existe aceleración, pues hay cambio de dirección del vector velocidad. Es fácil verlo si nos damos cuenta que ese cambio se observa en las componentes... v1 v3 v3 - v1 a
- 22. Esta curva representa la trayectoria seguida por una partícula. En el instante t1 el vector velocidad es v1 y en t2 el vector velocidad es v2. Son vectores tangentes a la trayectoria. v1 v2 = v1 + ∆v v 2 = v 1 + ∆ v v1 ∆v a ∆v ∆t =
- 23. x = xi + vix ∆t + ½ aox ∆t2 Modelo de movimiento con aceleración uniforme en 2D y = yi + viy ∆t + ½ aoy ∆t2 vx = vix + aox ∆t vy = viy + aoy ∆t ¿Esto les parece complicado?
- 24. Proyectiles Si consideramos despreciable la resistencia del aire (al igual que en el caso de caída libre), el movimiento de un proyectil sólo se ve influido por la aceleración de gravedad g y x 1 punto vx vy ¿qué componente del vector velocidad es función del tiempo? ¿cuál no?
- 25. Luego aox = 0 No hay aceleración en la horizontal aoy = −g En la vertical actúa la aceleración de gravedad x = xi + vox ∆t y = yi + viy ∆t - ½ g ∆t2 vx = vox vy = viy - g ∆t
- 26. Una bala dejada caer desde el reposo y una proyectada hacia delante caen al mismo tiempo.
- 27. Distancia horizonal o alcance del proyectil y x alcance alcance El alcance (R) es el punto en la horizontal donde el proyectil toca el suelo. alcance Por simplicidad (lo que quiere decir que ustedes necesitan conocer los conceptos básicos y saber resolver problemas clásicos de mecánica), sólo veremos el caso cuando yi está a nivel del suelo (curva roja en la figura).
- 28. y x alcance α viy = |vi| senα vox = |vi| cosα y = yi + viy ∆t - ½ g ∆t2 (1) x = xi + vox ∆t (2) ∆y = |vi| senα ∆t - ½ g ∆t2 (1) se puede reescribir como Cuando el proyectil toque nuevamente el suelo ∆y = 0, por lo que (1) queda como 0 = (|vi| senα - ½ g ∆t) ∆t R = ∆x = x - xi
- 29. Como ∆t no puede ser igual a cero (luego que recorrió el alcance R), la ecuación anterior queda como 0 = |vi| senα - ½ g ∆t 2 |vi| senα = g ∆t ∆t = 2 |vi| senα / g vox = |vi| cosα Recordar que Se sustituye en (2) x = xi + vox ∆t ∆x = vox ∆t ∆x = |vi| cosα 2 |vi| senα / g R = |vi|2 sen2α / g sen2α ∆x = |vi|2 2 cosα senα / g
- 30. Se da un puntapié a una pelota desde el suelo con una velocidad de 25 m s-1 y un ángulo de 30° con respecto al suelo (horizontal): a) ¿Cuándo se alcanza la altura máxima?, b) ¿En que posición se encuentra en ese instante?, c) ¿Cuál es el alcance R? a) Cuando la altura es máxima, vy es igual a cero vy = viy - g ∆t viy = |vi| senα vy = |vi| senα - g ∆t vy = 0 |vi| = 25 m s-1 ∆t = |vi| senα / g sen(30°)= 0.5 Por lo tanto ∆t = 1,28 s g = 9,8 m s-2
- 31. b) Cuando se pide la posición... ¿qué se está pidiendo? ymax = yi + viy ∆t - ½ g ∆t2 |vi| = 25 m s-1 sen(30°)= 0.5 g = 9,8 m s-2 viy = |vi| senα ymax = yi + |vi| senα ∆t - ½ g ∆t2 yi = 0 m ∆t = 1,28 s ymax = 0 + (25) (0,5) (1,28) – (½) (9,8) (1,28)2 En y: = 7,97 m ymax = 7,97 m
- 32. En x: x = xi + vox ∆t vox = |vi| cosα x = xi + |vi| cosα ∆t |vi| = 25 m s-1 cos(30°)= 0,866 xi = 0 m ∆t = 1,28 s xa mitad de camino = 0 + (25) (0,866) (1,28) xa mitad de camino = 27,6 m
- 33. x r = ĵ î xa mitad de camino + xa mitad de camino ymax Respuesta en notación vectorial ymax Cuando alcanza la altura máxima, el proyectil se encuentra en el vector posición: r = ĵ î 27,6 + 7,97 m
- 34. R = |vi|2 sen2α / g c) El alcance del proyectil es |vi| = 25 m s-1 sen(60°)= 0,866 g = 9,8 m s-2 R = (25)2 (0,866) / 9,8 R = 55,2 m