

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Neurocomputacion
Similar a Neurocomputacion (20)
Más de ESCOM
Más de ESCOM (20)
Último
Último (20)
Neurocomputacion
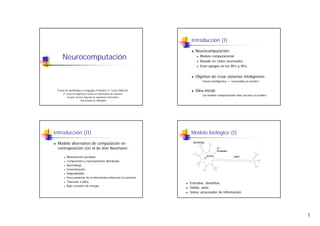
- 1. Introducción (I) Neurocomputación: Neurocomputación Modelo computacional Basado en redes neuronales Gran apogeo en los 80’s y 90’s. Objetivo de crear sistemas inteligentes: “tareas inteligentes -> reservadas al cerebro” Teoría de Autómatas y Lenguajes Formales II. Curso 2005-06. Idea inicial: 3º curso de Ingeniería Técnica en Informática de Sistemas “un modelo computacional más cercano al cerebro” Escuela Técnica Superior de Ingeniería Informática Universidad de Valladolid Introducción (II) Modelo biológico (I) Modelo alternativo de computación en contraposición con el de Von Neumann: Masivamente paralelos Computación y representación distribuida Aprendizaje Generalización Adaptabilidad Procesamiento de la información inherente al contexto Tolerante a fallos Entradas: dendritas Bajo consumo de energía Salida: axón Soma: procesador de información 1
- 2. Modelo biológico (II) Breve reseña histórica (I) Neuronas sensitivas: (1943) El neurobiólogo McCulloch y el Reciben las entradas directamente estadístico Pitts: Modelo de neurona artificial Neuronas actuadoras: Materializan la respuesta (1962) Rosenblatt: Velocidad de procesamiento: Teorema de convergencia del perceptrón 1011 neuronas en el cortex Extendió la euforia: “RNA, solución universal” 103 – 104 conexiones Lentitud de las señales electroquímicas Reconocimiento de una cara en milisegundos (1969) Minsky y Papert: Por tanto, es un sistema conexionista Limitaciones del perceptrón: problema del XOR Breve reseña histórica (II) Modelo de McCulloch y Pitts (I) (1982) Hopfield: RNA (sistema computacional): Red más plausible con el modelo biológico Conjunto de autómatas celulares (neuronas) Flujo de información según una topología de interconexiones (sinapsis) (1986) Rumelhart y McClelland: El paralelismo está marcado por la Aprendizaje del perceptrón multicapa disponibilidad de las entradas Original de Werbos (1974): Tesis Doctoral 2
- 3. Modelo de McCulloch y Pitts (II) Modelo de McCulloch y Pitts (III) x1 wk1 uk : activación o salida analógica Término bias, offset o umbral: yk : salida (digital) Eliminación del nivel de continua, que no x2 wk 2 uk yk θ k : umbral, bias u offset aporta información: Σ F (⋅) F : Función de activación θk xn wkn n uk = ∑ wkj x j ∈ (−∞, ∞) yk = F(uk − Θk ) j =1 n −1 Práctica: uk = ∑ wkj x j + wkn yk = F(uk ) j =0 Modelo de McCulloch y Pitts (IV) Modelo de McCulloch y Pitts (IV) Si el peso es positivo/negativo: F(x) debe ser acotada: +1 Sinapsis excitadora/inhibidora Heaviside: sgn(x) No diferenciables -1 +1 Semilineal Función de activación F(x): -1 Filtrar la salida para acotarla en sintonía con las 1 neuronales biológicas: 1 F ( x) = Los potenciales electroquímicos están acotados. Arcotangente 1 + e − βx Si la intensidad de una señal (sentido) supera un N - diferenciables valor, deja de percibirse como tal. Sigmoide Ejemplo: altas y bajas frecuencias del sonido. 0 0 3
- 4. Arquitectura Aprendizaje y recuperación (I) Grafo dirigido y ponderado Sistema neuronal: Clasificación: lazos de realimentación Altamente no lineal Redes Neuronales Gran robustez Tolerante a fallos Sin realimentación Con realimentación Adicionalmente: Aprendizaje: adaptación de sus pesos a cambios en el Perceptrón Perceptrón Función de Redes Redes de Redes entorno Simple Multicapa Base Radial Competitivas Hopfield ART Manejo de información imprecisa, difusa, con ruido y basada en probabilidades Generalización: respuesta satisfactoria ante casos desconocidos Aprendizaje y recuperación (II) Aprendizaje y recuperación (III) El modelo computacional equivalente al Aprendizaje: de Von Neumann Definir una función objetivo explícita o implícitamente para representar el estado de la red. Buscar un óptimo de esta función modificando los pesos. Principal inconveniente: No se conoce algoritmo capaz de entrenar una Tipos: RNA arbitraria Supervisado: maneja (entrada, salida deseada) Ajuste de pesos para minimizar esta diferencia Ejemplo: perceptrón multicapa (MLP) Actualmente: No supervisado: Se conocen tipos particulares de redes con, al Evolución del sistema hasta un estado estable menos, un algoritmo de aprendizaje Ejemplo: mapa autoorganizado (SOM) 4
- 5. Aprendizaje y recuperación (IV) Aplicaciones (I) Principal característica: Reconocimiento de patrones: Capacidad de GENERALIZACIÓN: Asignar a cada entrada un patrón: Calidad de la respuesta ante ejemplos desconocidos: Estáticos no utilizados en el aprendizaje Dinámicos: trata explícitamente el tiempo Dos modos de funcionamiento: Clustering: Aprendizaje y recuperación Agrupamiento no supervisado de muestras Redes heteroasociativas Extracción de características diferenciadoras entre Aprendizaje conlleva mayor cómputo muestras Redes autoasocitivas Recuperación es la fase más costosa Actúa de forma opaca: espacio de características Aplicaciones (II) Aplicaciones (III) Aproximación funcional: Optimización Correspondencia (x, y) contaminados con Definir función objetivo ruido Encontrar óptimo bajo restricciones Ejemplo: problema del viajante Predicción: Adivinar el siguiente término de una serie: Memorias asociativas: Meteorología Direccionables por contenido Bolsa Recuperar la información original a partir Demanda de consumo de una parcialmente distorsionada 5
- 6. Aplicaciones (IV) Generación de señales de control Calcular señales de control para que la “consigna” siga a la “referencia” Especialmente aplicables en sistemas altamente no lineales y complejos Se consigue la respuesta a partir del aprendizaje con ejemplos 6