

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Tema9
Similar a Tema9 (20)
Último
Último (20)
Tema9
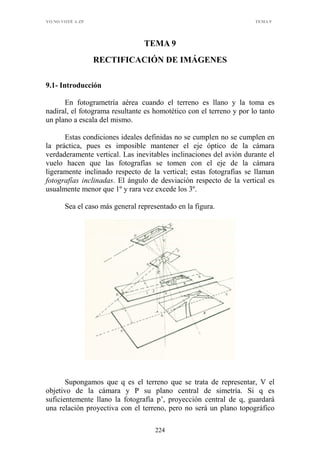
- 1. YO NO VOTÉ A ZP TEMA 9 224 TEMA 9 RECTIFICACIÓN DE IMÁGENES 9.1- Introducción En fotogrametría aérea cuando el terreno es llano y la toma es nadiral, el fotograma resultante es homotético con el terreno y por lo tanto un plano a escala del mismo. Estas condiciones ideales definidas no se cumplen no se cumplen en la práctica, pues es imposible mantener el eje óptico de la cámara verdaderamente vertical. Las inevitables inclinaciones del avión durante el vuelo hacen que las fotografías se tomen con el eje de la cámara ligeramente inclinado respecto de la vertical; estas fotografías se llaman fotografías inclinadas. El ángulo de desviación respecto de la vertical es usualmente menor que 1º y rara vez excede los 3º. Sea el caso más general representado en la figura. Supongamos que q es el terreno que se trata de representar, V el objetivo de la cámara y P su plano central de simetría. Si q es suficientemente llano la fotografía p’, proyección central de q, guardará una relación proyectiva con el terreno, pero no será un plano topográfico
- 2. YO NO VOTÉ A ZP TEMA 9 225 puesto que la relación proyectiva anterior en general no será una homotecia. Para que fuese una homotecia, habría que cortar el haz proyectante desde V por un plano q1 paralelo al plano q del terreno; en esas circunstancias, las figuras Σ1 y Σcontenidas en ellos serían semejantes, y esa relación de semejanza o escala podría variarse modificando la altura de q1. Seis parámetros independientes llamados elementos de orientación externa expresan la situación espacial y la orientación angular de la fotografía inclinada. La posición espacial viene dada normalmente por XL, YL, ZL, las coordenadas terreno del centro de proyección. En general ZL se llama H, altura de vuelo respecto del plano de comparación o datum. La orientación angular es la magnitud y dirección de la inclinación de la foto. Tres ángulos son suficientes para definir la orientación angular; hay varios sistemas: inclinación-giro-acimut, omega-phi-kappa. 9.2- Rectificación de fotografías inclinadas. Por rectificación se conoce el proceso fotogramétrico mediante el cual se puede transformar una imagen en una proyección del terreno, por medio del enderezamiento del eje del fotograma. La rectificación corrige los desplazamientos existentes en la imagen fotográfica original producidos por la inclinación del eje de la toma. La imagen rectificada debe tener las características geométricas de una proyección ortogonal del objeto fotografiado sobre un cierto plano y a una determinada escala. Se presupone que el objeto es plano y vertical. Para poder realizarse una rectificación se han de cumplir dos condiciones: • Ángulo de inclinación de la toma tiene que ser muy pequeño (3º). • El terreno tiene que ser prácticamente horizontal y llano. Rectificación: proceso de obtención de una fotografía vertical equivalente a partir de una fotografía inclinada. Las fotografías verticales equivalentes resultantes se llaman fotografías rectificadas. En teoría son fotos realmente verticales, y como tal están libres de desplazamientos por inclinación. Sin embargo, las imágenes continúan teniendo desplazamientos causados por el relieve topográfico del terreno. Estos desplazamientos causados por el
- 3. YO NO VOTÉ A ZP TEMA 9 226 relieve pueden ser eliminados en un proceso denominado rectificación diferencial o también ortorrectificación, y los resultados se llaman ortofotos. Tipos de rectificación de fotografías inclinadas Según el instrumental empleado: - Óptico-mecánica: rectificador - Analítica: restituidor analítico - Digital: Estación Fotogramétrica Digital La rectificación se puede realizar de tres formas: analítica, óptico- mecánica y digital. La rectificación analítica tiene la desventaja de que sólo pueden ser aplicados a puntos individuales discretos, es decir, puntos que pueden ser identificados específicamente y por tanto sus localizaciones en la foto inclinada pueden medirse. Las fotos rectificadas resultantes producidas por este método no son realmente fotos puesto que no están compuestas por imágenes fotográficas; más bien son dibujos de puntos individuales en sus localizaciones rectificadas. Los métodos óptico-mecánicos y digital producen una foto real en la que las imágenes de la foto inclinada han sido rectificadas a sus posiciones rectificadas. Además, los productos de estos dos métodos pueden ser usados en la producción de fotomapas y mosaicos. En cualquiera de los procedimientos de rectificación las fotos rectificadas pueden ser simultáneamente escaladas, es decir, su escala media puede hacerse
- 4. YO NO VOTÉ A ZP TEMA 9 227 coincidir con algún valor diferente al de la foto original. Esto es particularmente ventajoso si las fotos rectificadas se hacen con el propósito de construir un mosaico controlado, puesto que todas las fotos de la pasada o bloque pueden ser hechas a la misma escala. Geometría de la rectificación La geometría fundamental de la rectificación se muestra en la siguiente figura. La figura muestra una vista lateral del plano principal de una foto inclinada. Cuando fue hecha la exposición, el plano del negativo formaba un ángulo t con el plano de referencia. Los rayos desde A y B cortan el negativo en a’ y b’, respectivamente, y sus imágenes correspondientes en la fotografía inclinada son a y b. El plano de una fotografía vertical equivalente es paralelo al plano de referencia y pasa a través de i, el isocentro de la fotografía inclinada. El plano de una fotografía rectificada escalada es también paralelo al plano de referencia pero a diferente distancia. La rectificación óptico-mecánica se realiza como se muestra en la siguiente figura
- 5. YO NO VOTÉ A ZP TEMA 9 228 Izquierda, rectificador Zeiss SEG-5. Derecha, efecto de los ajustes en el rectificador. El método óptico-mecánico se aplica en instrumentos llamados rectificadores. Estos producen fotos rectificadas y escaladas a través del proceso de impresión fotográfica de la proyección del negativo. Este proceso se ha de realizar a oscuras. El diagrama general sería el siguiente:
- 6. YO NO VOTÉ A ZP TEMA 9 229 Tal como se ve en la figura, los componentes básicos de un rectificador son una lente, una fuente de luz con un reflector, una plataforma para montar el negativo de la foto, y un tablero lo proyección sobre el cual se coloca el papel fotosensible sobre el cual se proyectará la foto rectificada. Este instrumento se construye con unos controles de forma que el plano del tablero, el plano de la lente y el plano del negativo puedan ser inclinados con respecto a los otros. Algunos rectificadores pueden variar la inclinación de los planos de la lente y del tablero, pero la mayoría solo pueden variar la inclinación de los planos del negativo y del tablero. Este tipo de rectificadores se conocen como rectificadores de lente sin inclinación. Puesto que las fotos rectificadas pueden ser a diferentes escalas, el rectificador debe tener capacidad de ampliación, y esto se consigue variando la distancia de proyección. Para hacer esto y continuar manteniendo un enfoque nítido es necesario variar simultáneamente la distancia imagen. La rectificación analítica Hay varios métodos disponibles para realizar la rectificación analítica (numérica). Cada uno de los métodos analíticos realiza rectificación punto a punto, y requiere que suficientes puntos de control aparezcan en la foto inclinada. Los datos iniciales requeridos son: - Coordenadas terreno de los puntos de control. - Coordenadas foto de los puntos de control. - Coordenadas foto de todos los puntos que se van a rectificar (medidas en un comparador). Con dichos datos se realiza la determinación de la transformación matemática entre coordenadas imagen y coordenadas terreno y luego el cálculo de las coordenadas terreno de los puntos imagen medidos. El resultado final es un fichero vectorial.
- 7. YO NO VOTÉ A ZP TEMA 9 230 Rectificación digital La rectificación puede hacerse mediante técnicas digitales, pixel a píxel, a partir de la imagen digital original o una imagen analógica escaneada. Los datos iniciales son las coordenadas terreno de los puntos de control y las coordenadas foto de los puntos de control. El proceso consta de dos pasos: - Determinación de la transformación matemática entre coordenadas imagen y coordenadas terreno - Obtención de una nueva imagen alineada con respecto al sistema de referencia terreno Luego se realiza un remuestreo digital, asegurando así que todos los pixeles de la ortofotografía resultante, tengan su nivel de gris. El remuestreo (resampling) consiste en aplicar una técnica para determinar el nivel de gris que le corresponde a cada píxel, debido a que la posición proyectada no tiene porqué coincidir con la posición original del mismo ni con su valor entero. Al realizar la transformación espacial se tiene que los valores de las coordenadas de la imagen no coincidirán con los de la imagen original de forma que habrá puntos que no quedarán definido por sus niveles digitales (como se ve en la figura). Por tanto, es necesario interpolar el valor de gris. Por medio de este método (remuestreo) hacemos varios muestreos sobre la imagen inicial. Cada vez que se efectúan cambios geométricos en la imagen digital, surgen varios errores de forma inevitable.
- 8. YO NO VOTÉ A ZP TEMA 9 231 Los tres métodos de remuestreo más frecuentemente usados son: - Vecino más próximo. - Interpolación bilineal. - Convolución bicúbica. Comparativa tipos de rectificación Métodos de Rectificación Las transformaciones empleadas en la rectificación de imágenes son: - Transformación de Helmert - Transformación afín - Transformación polinómica - Transformación proyectiva bidimensional A) Transformación de Helmert: (fotos aéreas de escalas pequeñas) X, Y: coordenadas terreno x, y: coordenadas foto a, b, Tx, Ty: parámetros de la transformación 1 giro + 1 homotecia + 2 traslaciones 2 ecuaciones por P.A. mínimo 3 P.A. para MMCC
- 9. YO NO VOTÉ A ZP TEMA 9 232 Ejemplo: B) Transformación Afín: Ejemplo: 1 giro + 1 traslación + homotecia en x + homotecia en y + falta de perpendicularidad 6 parámetros. 2 ecuaciones por P.A. Mínimo 4 P.A. para MMCC
- 10. YO NO VOTÉ A ZP TEMA 9 233 C) Transformación Polinómica: Es un polinomio para ajustar los puntos de control del fotograma sobre el terreno. Se necesitan 6 P.A. para 1 ecuación. Si se desea hacer un ajuste por MMCC, se necesita un mínimo de 7 P.A. Ejemplo de una Transformación Polinómica 2º grado:
- 11. YO NO VOTÉ A ZP TEMA 9 234 D) Transformación Proyectiva: (el más usado) La transformación proyectiva plantea la relación existente entre dos planos (figura). Esta relación es definida por 8 parámetros (suponemos z = 0 y así eliminamos un parámetro) que pueden calcularse a partir de cuatro puntos de control y sus correspondientes coordenadas imagen. No es necesario el cálculo de los elementos de orientación interna y externa puesto que están incluidos implícitamente en los coeficientes de la transformación. Este método es de uso frecuente para rectificación de fotografías aéreas de zonas llanas o de imágenes de fachadas de edificios. La expresión de la transformación proyectiva puede ser modificada para la toma de una imagen desde un satélite. Los sensores instalados en los satélites, como por ejemplo el SPOT, realizan la captura mediante un barrido de líneas, por tanto, su geometría es de tipo perspectiva lineal, no existiendo un punto de vista sino una línea de vista. Cada línea de barrido tiene un centro de perspectiva diferente que se puede asumir que están en una línea recta (órbita). Si se considera el eje y en la dirección de vuelo y x representa el pixel en la línea de barrido, la expresión de la transformación perspectiva se modifica de la forma: La utilización de este método en el tratamiento de imágenes satélites es compleja ya que debido a la curvatura terrestre, el definir la superficie terrestre como un plano lleva a producir errores en la imagen rectificada, incluso para terrenos llanos. No obstante, este método es valido para la rectificación de imágenes de sensores aerotransportados. 2 ecuaciones por P.A. Necesitamos 5 P.A. para MMCC.
- 12. YO NO VOTÉ A ZP TEMA 9 235 Cálculo de parámetros de la Transformación Proyectiva 2D: 1 1 1 3 3 2 2 2 3 3 1 1 a x b y c X a x b y a x b y c Y a x b y + + = + + + + = + + ( ) ( ) 3 3 1 1 1 3 3 2 2 2 1 1 X a x b y a x b y c Y a x b y a x b y c + + = + + + + = + + 1 1 1 3 3 2 2 2 3 3 a x b y c a x X b y X X a x b y c a x Y b y Y Y + + − ⋅ − ⋅ = + + − ⋅ − ⋅ = 1 1 1 2 2 2 3 3 1 0 0 0 0 0 0 1 a b c ax y xX yX X bx y xY yY Y c a b − − ⋅ = − − Ejemplo: La fotografía rectificada mantiene la horizontalidad y verticalidad de las líneas del objeto.
- 13. YO NO VOTÉ A ZP TEMA 9 236 Rectificación digital Consiste en el cálculo de los parámetros de la transformación proyectiva bidimensional que relaciona coordenadas terreno y coordenadas imagen a partir de los puntos de control: - 8 incógnitas: a1, a2, a3, b1, b2, b3, c1, c2 - 1 punto de control → 2 ecuaciones - 4 ptos control → 8 ecuaciones y 8 incógnitas: sistema compatible determinado - Más de 4 puntos de control → resolución del sistema por mínimos cuadrados Los pasos a seguir son: - Creación de una nueva imagen alineada con respecto al sistema de referencia terreno. - Determinación de la posición que tenía en la foto inclinada el centro de un pixel de la nueva imagen. - Relleno de la nueva imagen con el valor digital correspondiente La rectificación de fotogramas puede hacerse mediante técnicas digitales que incorporan un escáner fotogramétrico y un proceso de cálculo. Este procedimiento es un caso especial del concepto general de georreferenciación de una imagen digital. La georreferenciación es una técnica mediante la cual se procesa una imagen digital de modo que las filas y columnas de la imagen resultado estén alineadas con el norte y el este de un sistema de coordenadas terreno. La diferencia es que la rectificación requiere que se use una transformación proyectiva para relacionar la imagen con el sistema de coordenadas terreno. Mientras que la georreferenciación a menudo usa transformaciones más simples como transformación conforme bidimensional o la transformación afín tridimensional. Los tres dispositivos necesarios para la rectificación diferencial son un escáner fotogramétrico, un ordenador, y una impresora o dispositivo capaz de generar una imagen digital.
- 14. YO NO VOTÉ A ZP TEMA 9 237 Georreferenciación de una imagen digital: Consta de dos pasos: calcular los parámetros de una transformación de coordenadas bidimensional que relacione la imagen digital con el sistema terreno, y rellenar una matriz alineada con el sistema de coordenadas terreno con los valores digitales apropiados que cuantifican el nivel digital del terreno en las localizaciones correspondientes a las posiciones de la matriz. En el primer paso se selecciona un cierto número de puntos terreno de control (GCP) que puedan ser identificados en la imagen y de los que se conozcan con precisión las coordenadas terreno. Las coordenadas imagen fila y columna de cada GCP son obtenidas y relacionadas con las coordenadas terreno. El método más simple para obtener las coordenadas imagen es mostrar la imagen en pantalla; entonces, usando por ejemplo el ratón, se coloca el cursor sobre el punto imagen y se cargan las coordenadas fila y columna apretando algún botón. La transformación de coordenadas en este primer paso del proceso de georreferenciación convierte las coordenadas terreno a coordenadas imagen. Se podría usar cualquier transformación de coordenadas bidimensional, pero las más habituales son la conforme y la afín. En el segundo paso se produce una imagen que esté alineada con el sistema de coordenadas terreno. Para entender mejor este paso podemos imaginar el terreno dividido en elementos individuales llamados groundels, análogos a los pixels de la imagen digital. La diferencia es que mientras los pixels no tienen una relación específica con el terreno, los groundels están ordenados en una malla que es paralela al sistema de coordenadas terreno.
- 15. YO NO VOTÉ A ZP TEMA 9 238 Para cada groundel se transforman las coordenadas terreno X, Y de su punto central en sus correspondientes coordenadas imagen, aplicando los parámetros calculados en el primer paso. A continuación el nivel digital de la imagen correspondiente a dichas coordenadas imagen se guardan en la matriz terreno. Esto es lo que se llama remuestreo. El proceso se aplica a cada uno de los elementos de la malla. Remuestreo: Métodos de remuestreo (resampling): - Vecino más próximo (nearest neighbour) Asigna el ND del pixel más próximo en la imagen original - Interpolación bilineal Promedia el ND de los 4 pixels más próximos en la imagen original - Convolución cúbica Promedia el ND de los 9 pixels más próximos en la imagen original - Convolución bicúbica Promedia el ND de los 16 pixels más próximos en la imagen original A grandes rasgos el remuestreo consiste en asignar valores y la rectificación consiste en cambiar las coordenadas y por lo tanto la geometría de la imagen. Desplazamiento causado por el relieve: Fotografía vertical
- 16. YO NO VOTÉ A ZP TEMA 9 239 9.3- Errores en la rectificación Son causados por la diferencia entre la altitud de la superficie del terreno y la altitud del plano de referencia. Se producen desplazamientos radiales desde el punto nadir hacia afuera si el terreno es más alto que el plano de referencia y hacia adentro si es más bajo. Magnitud del desplazamiento: b r r h f m ∆ = ⋅ ⋅ El desplazamiento es proporcional a la distancia radial r. Para ajustar el error a la tolerancia deseada habrá que limitarse a utilizar la zona central del fotograma.
- 17. YO NO VOTÉ A ZP TEMA 9 240 Desplazamiento debido al relieve más pormenorizadamente: Se ha establecido como requisito indispensable para poder realizar correctamente una rectificación el disponer de un terreno horizontal y llano, por supuesto siempre dentro de unos ciertos límites de tolerancia, que vienen impuestos por los errores admisibles en la proyección, debido a los desplazamientos del relieve. El desplazamiento del relieve se ilustra en la figura 2, donde se representa una toma fotográficavertical tomada a un altura media de vuelo de valor H. La distancia principal de la cámara es c y O es el centro de proyección de la toma. La imagen del punto P sobre el terreno de altura h queda representado sobre el plano de la imagen por p. Un punto imaginario P´ es localizado en la vertical del punto P, sobre el plano de referencia (terreno), y sus correspondiente posición sobre la imagen viene dada por p´. En la figura se observa que el desplazamiento del punto P producido por el relieve h viene dado por en la imagen por el segmento rr´= (∆r) , siendo un desplazamiento radial desde el punto principal. Lógicamente cuanto más alejado estemos del centro de la fotografía mayor será la magnitud de dicho desplazamiento.
- 18. YO NO VOTÉ A ZP TEMA 9 241 De la figura se deduce las expresiones siguientes: Igualando las dos expresiones anteriores tendremos: Sustituyendo en la expresión ∆r = r-r´ tendremos: siendo ∆r el desplazamiento producido en la imagen por el relieve del terreno, h la altura del objeto, H la altura de vuelo y r la distancia radial sobre la fotografía desde el punto principal al punto desplazado. Esta ecuación expresa el desplazamiento del relieve para fotogramas verticales. Observando la ecuación se deduce que el desplazamiento debido al relieve aumenta con el incremento de la distancia radial y también incrementa con el aumento de la altura de los objetos. Errores en la rectificación
- 19. YO NO VOTÉ A ZP TEMA 9 242 Rectificación: cuestiones ¿Se necesita conocer la geometría de la cámara? ¿Es necesario recubrimiento estereoscópico? ¿Hay que realizar las orientaciones previamente a la rectificación? ¿Cuántos puntos de apoyo se necesitarán para la rectificación? ¿Las imágenes obtenidas tras la rectificación tienen algún tipo de error? ¿En qué casos se puede aplicar la rectificación? ¿Es adecuada la rectificación en el caso de imágenes aéreas? PROBLEMAS Libro 99.4137 Nº 7, 8, 9 y 10.