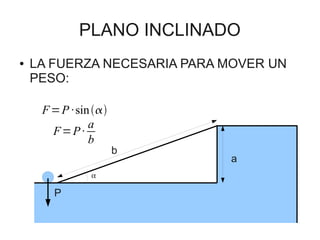
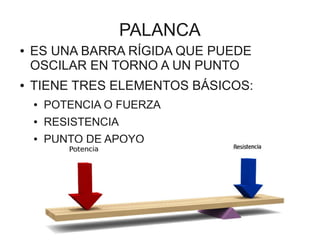
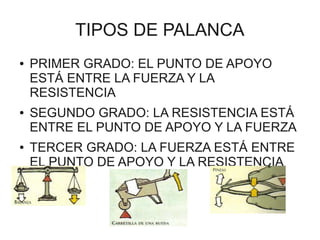
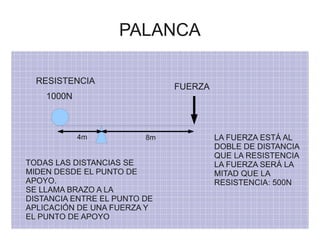
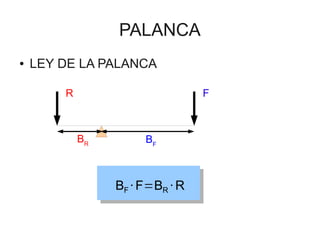
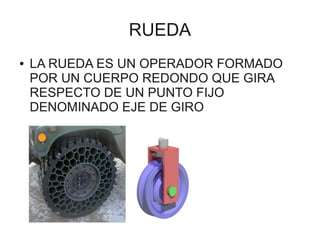
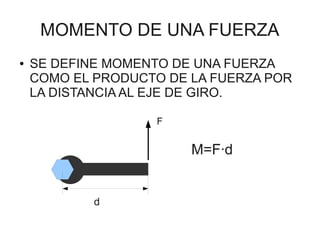
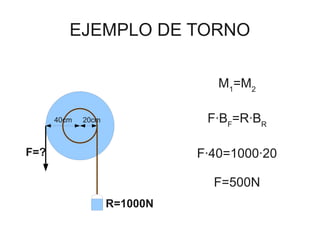
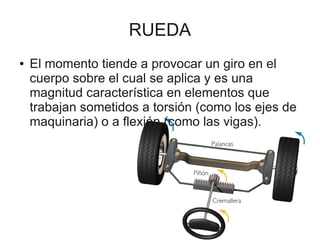
Este documento describe diferentes tipos de máquinas y mecanismos, incluyendo ejemplos de máquinas simples como el plano inclinado, la palanca y la rueda. Explica conceptos clave como trabajo, fuerza y momento de una fuerza, y cómo se transmiten y transforman los movimientos a través de mecanismos como engranajes, poleas y correas. También proporciona detalles sobre cómo funcionan máquinas específicas y enlaces a páginas web adicionales sobre mecánica.