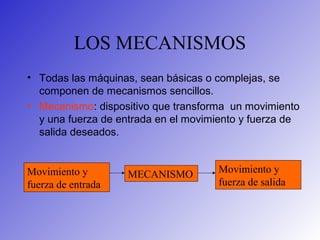
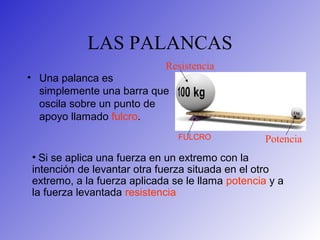
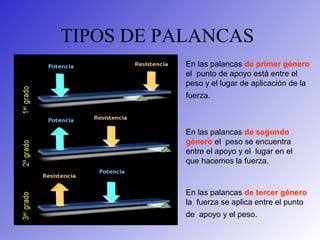
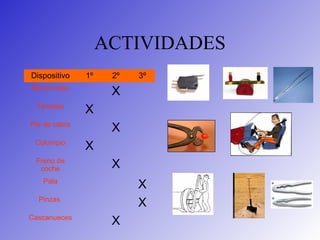
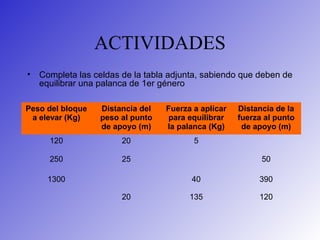
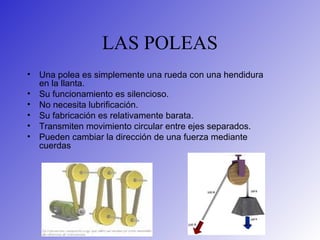
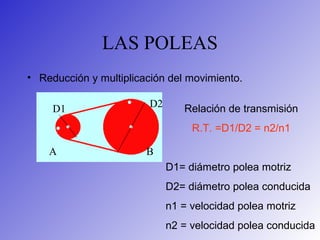
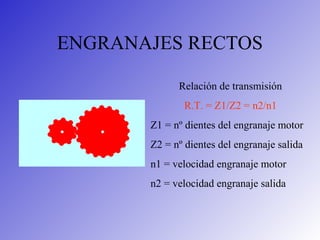
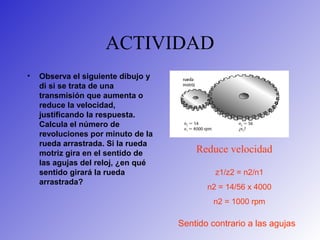
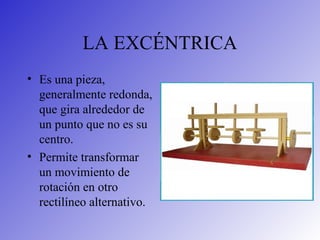
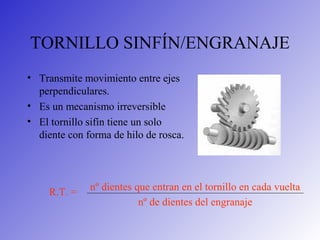
El documento describe los diferentes tipos de mecanismos, incluyendo palancas, poleas, engranajes, ejes de transmisión y otros. Explica cómo cada mecanismo transforma un movimiento o fuerza de entrada en un movimiento o fuerza de salida deseada mediante principios físicos como el equilibrio de momentos de fuerza o la relación entre el número de dientes o diámetros de las piezas rotatorias. También incluye ejemplos y actividades para comprender mejor el funcionamiento y aplicación práctica de estos mecanismos básicos.