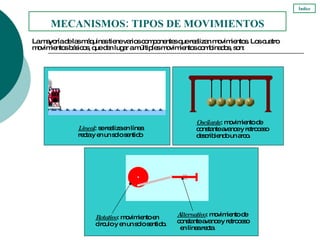
Este documento trata sobre los componentes y tipos de máquinas. Explica los diferentes tipos de mecanismos como palancas, ruedas, poleas y engranajes que permiten transmitir y transformar fuerzas y movimientos. También describe los cuatro tipos básicos de movimiento y cómo se pueden combinar.