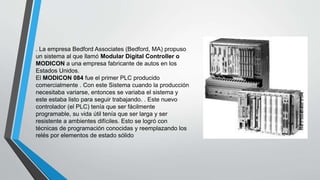
El primer PLC fue creado en 1968 para reemplazar los sistemas de control basados en relés, los cuales tenían un alto costo de mantenimiento. El MODICON 084 fue el primer PLC producido comercialmente por la compañía Bedford Associates. Los PLC permitían variar fácilmente la producción y tenían una larga vida útil gracias al uso de elementos de estado sólido en lugar de relés.