Descargado 2934 veces
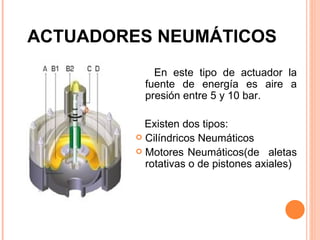
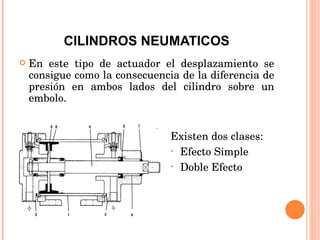
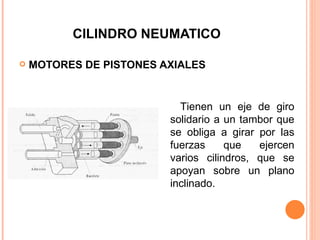




Este documento presenta los diferentes tipos de actuadores utilizados en robots, incluyendo actuadores neumáticos, hidráulicos y eléctricos. Los actuadores neumáticos usan aire a presión y incluyen cilindros neumáticos y motores. Los actuadores hidráulicos usan aceite a alta presión y ofrecen alta potencia y precisión. Los más comunes son los actuadores eléctricos como motores DC, paso a paso y de corriente alterna, los cuales proporcionan un control sencillo


































































