Descargado 72 veces

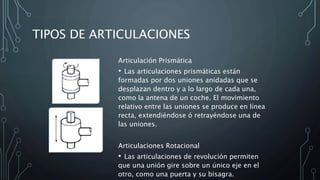
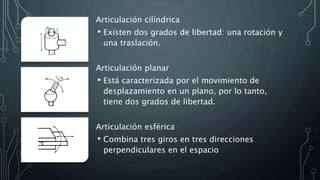

Un robot está formado por una serie de elementos unidos por articulaciones que permiten movimiento relativo. Existen cinco tipos básicos de articulaciones: rotacional, prismática, cilíndrica, planar y esférica, que permiten uno, dos o tres grados de libertad de movimiento. Las articulaciones rotacionales y prismáticas permiten un solo grado de libertad, mientras que las cilíndricas, planares y esféricas permiten dos o tres grados de libertad.



























































