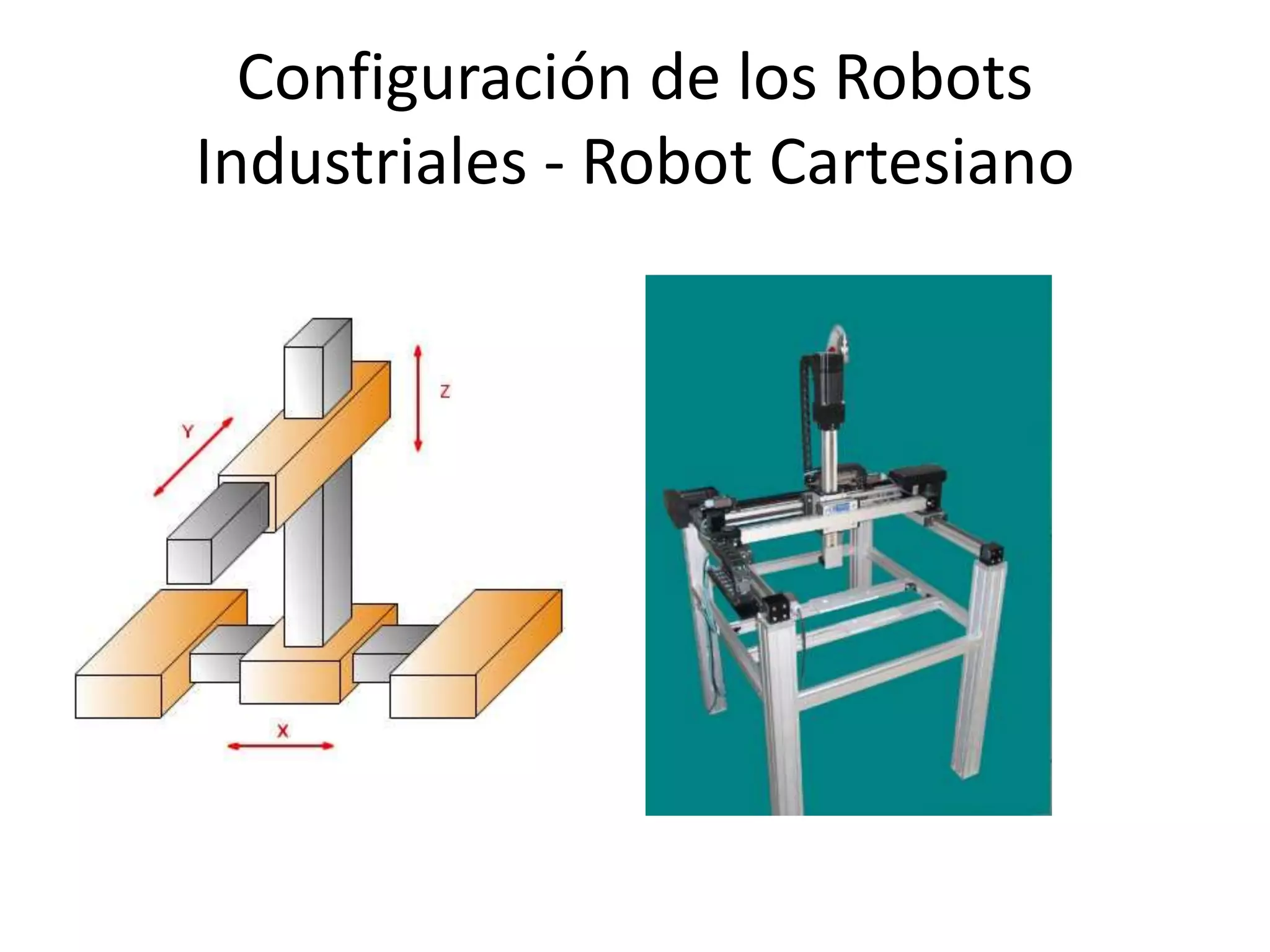
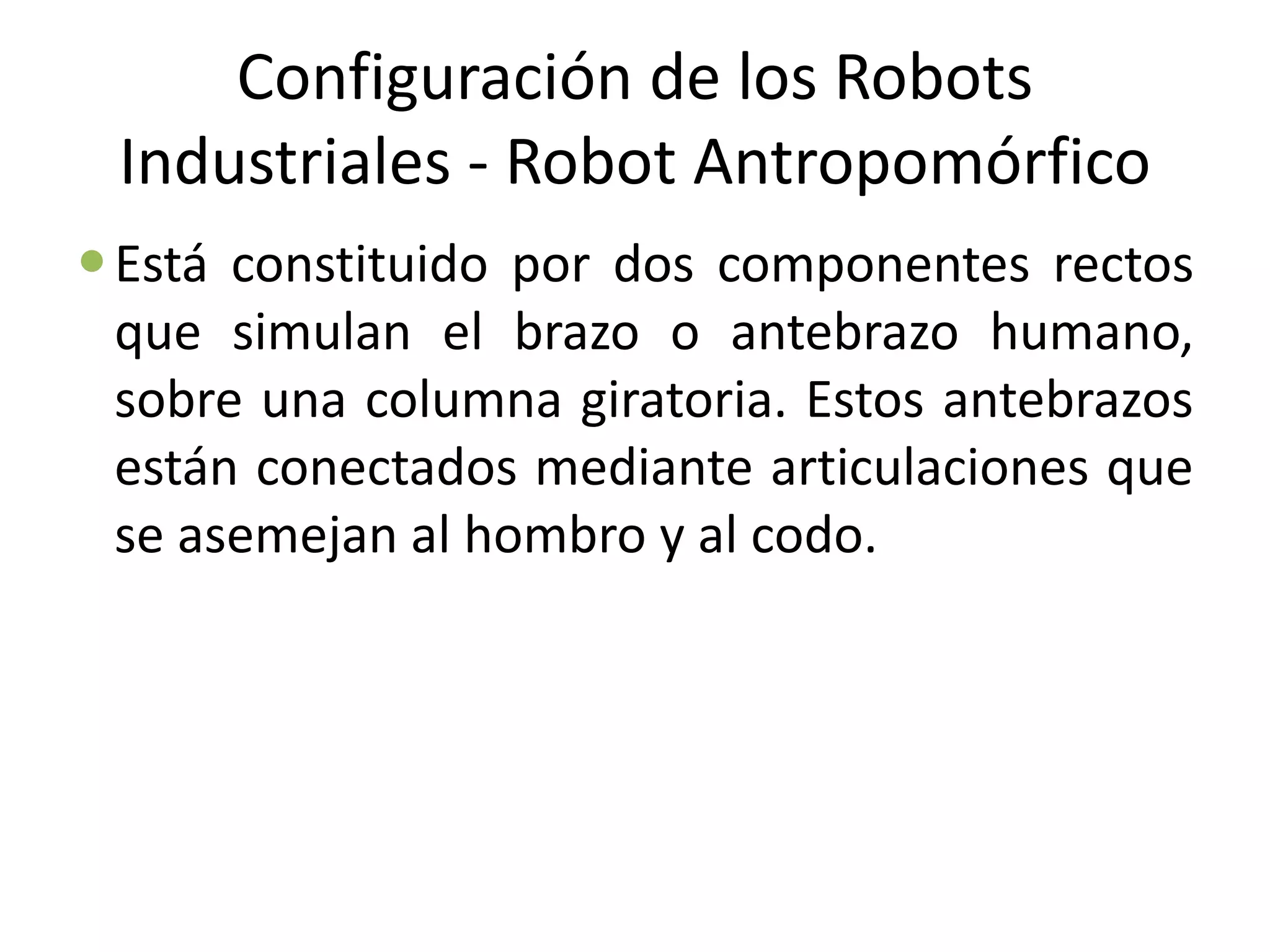
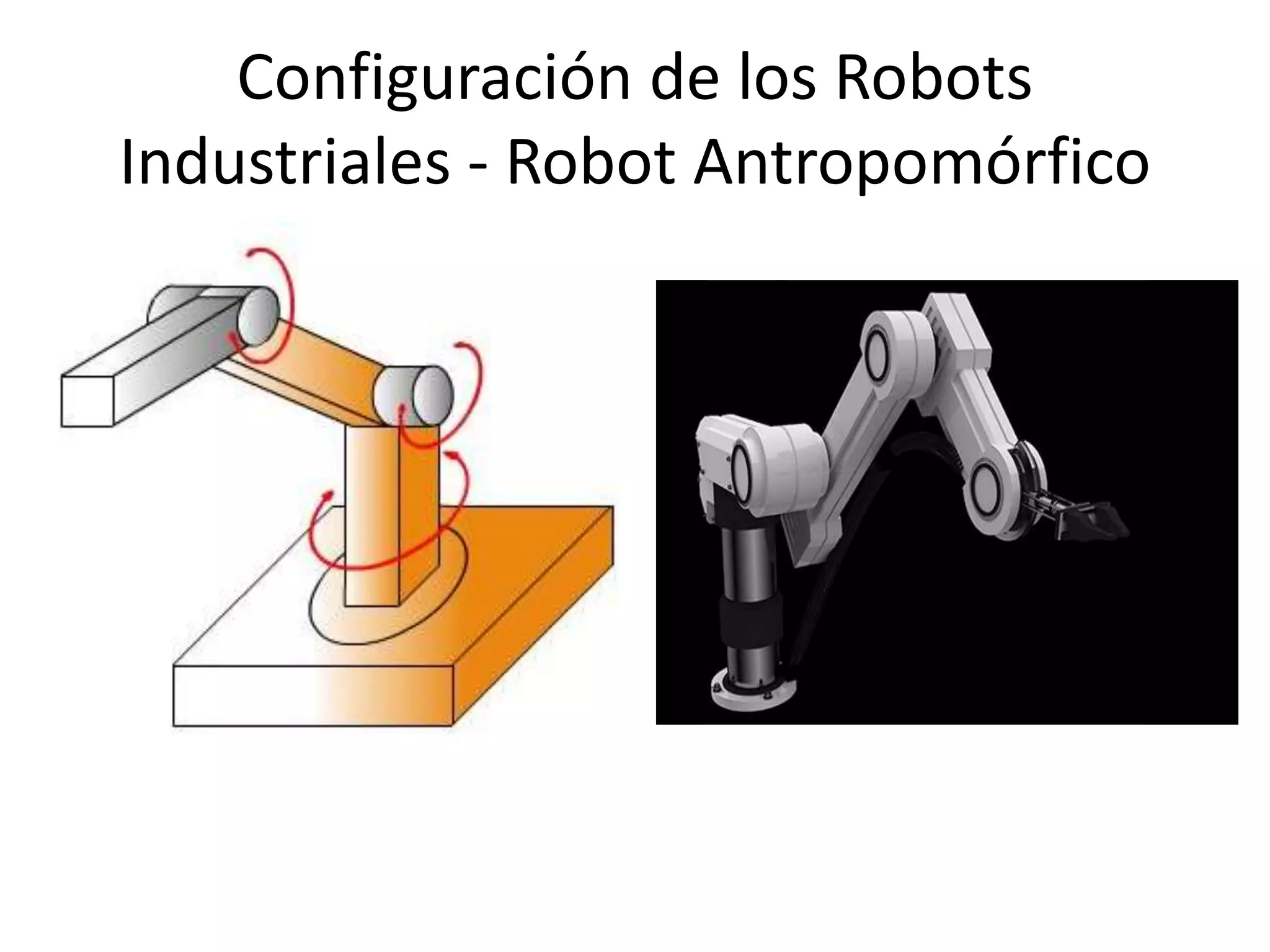
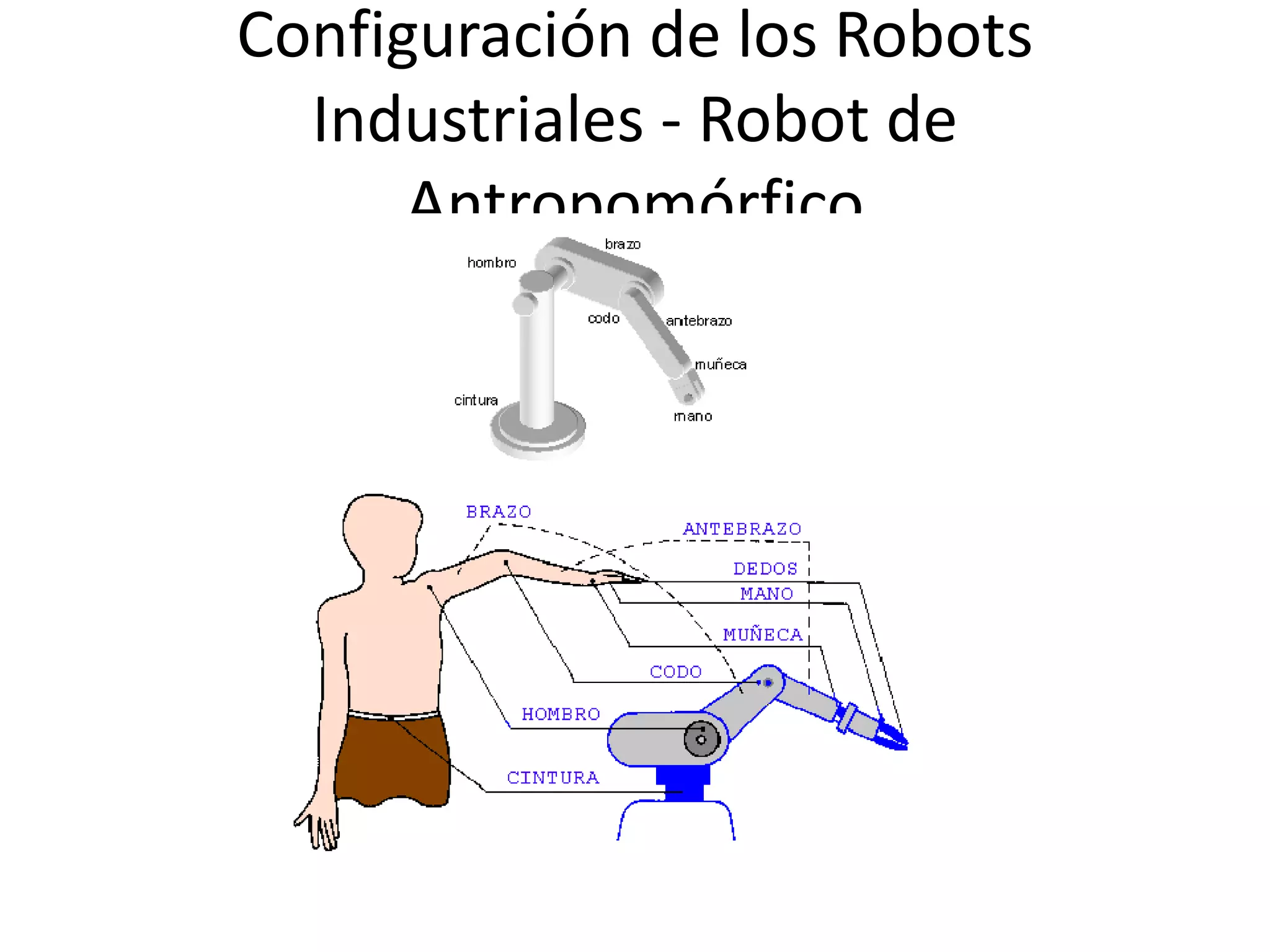
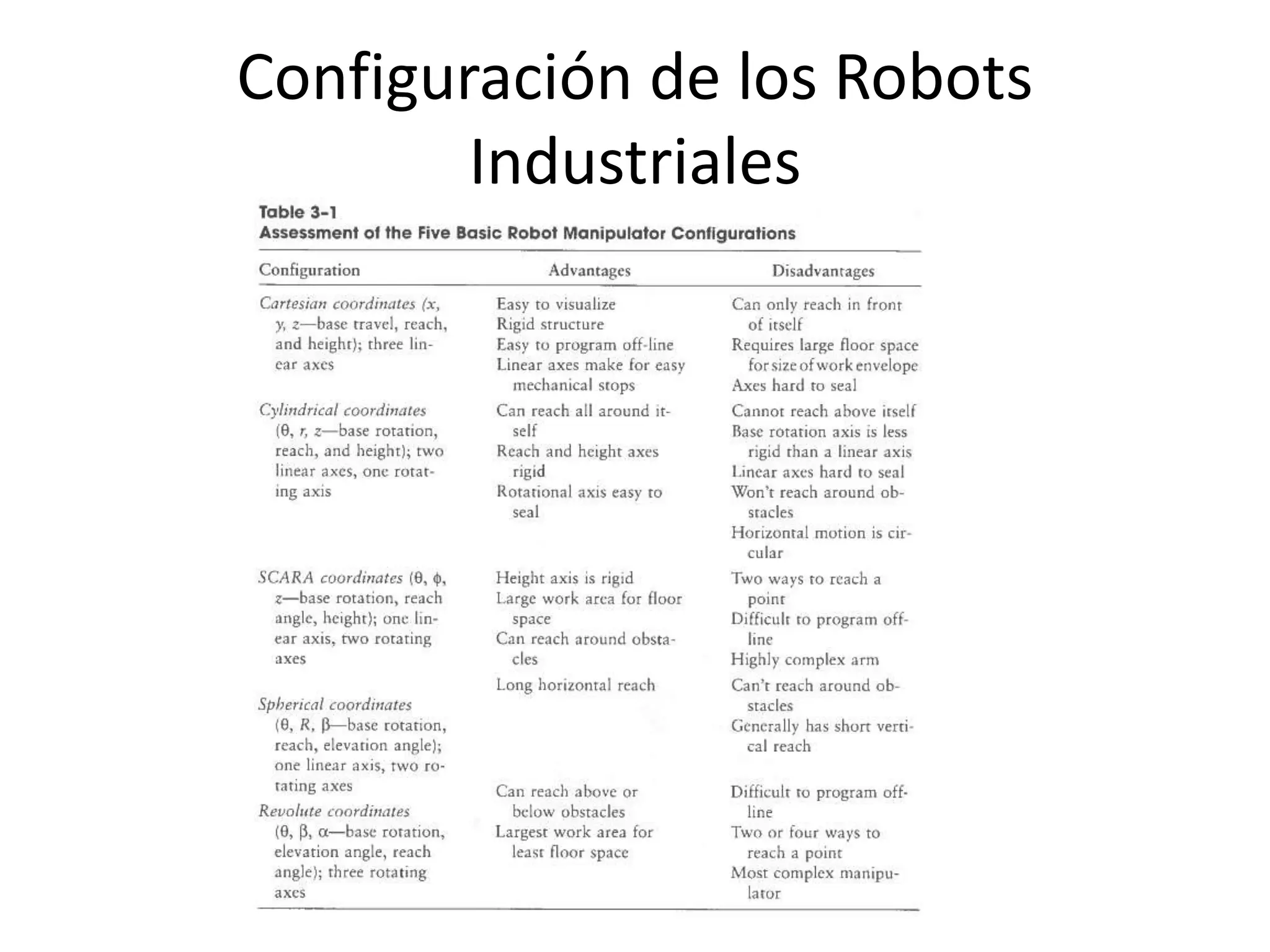
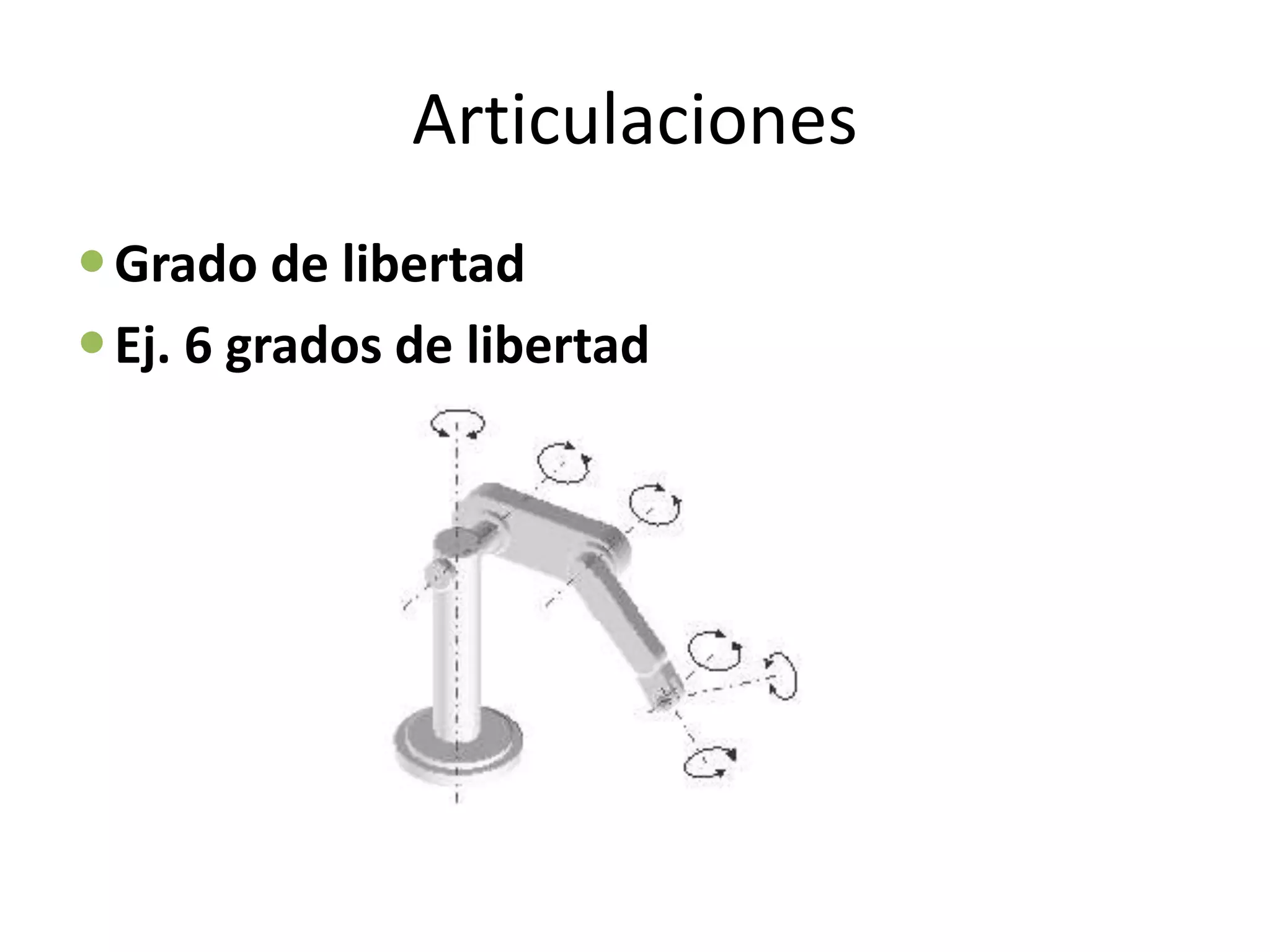
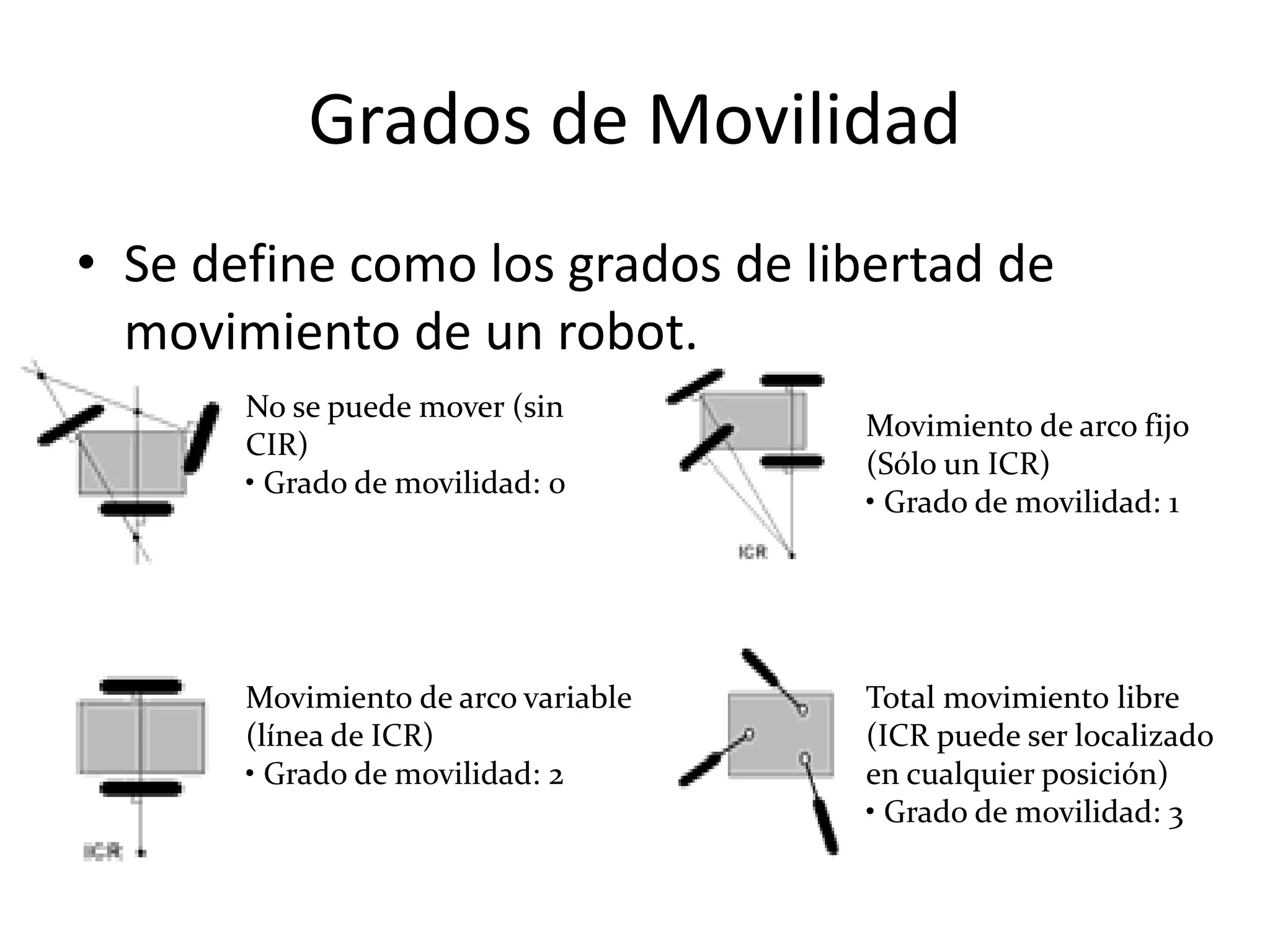
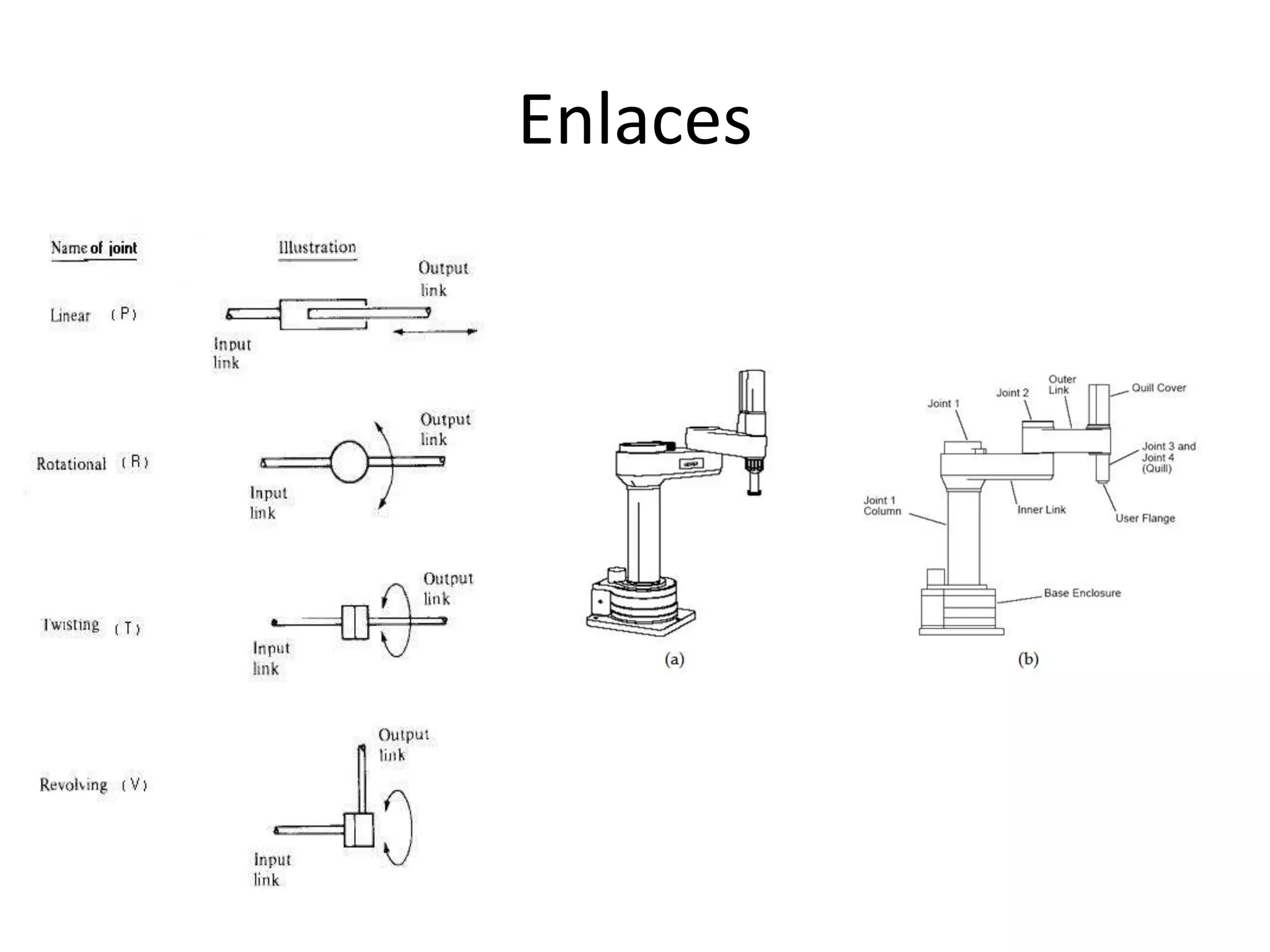
El documento describe las diferentes configuraciones de los robots industriales, incluyendo robots cartesianos, cilíndricos, polares, SCARA y antropomórficos. Explica que cada robot tiene grados de libertad proporcionados por sus articulaciones y enlaces, y que el número de grados de libertad determina la complejidad de las tareas que puede realizar. Además, detalla las funciones de la muñeca, el brazo robótico y los elementos finales de un robot.