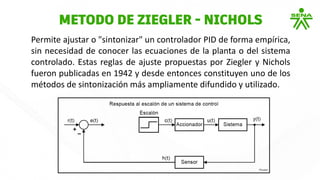
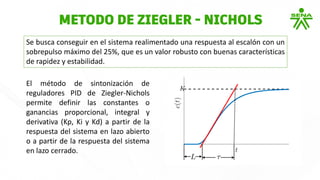
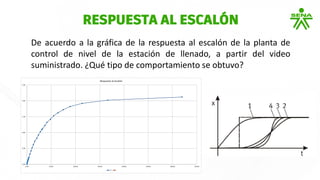
El método de Ziegler-Nichols permite la sintonización empírica de un controlador PID sin conocer las ecuaciones del sistema. Publicado en 1942, este método se basa en la respuesta del sistema en lazo abierto o cerrado para definir las constantes del controlador. Se busca lograr una respuesta al escalón con un sobrepulso máximo del 25%, considerando parámetros como el tiempo muerto y la ganancia del sistema.