
Recomendados
Más contenido relacionado
Similar a Un controlador PID (Proporcional, Integral, Derivativo) o dispositivo de control ampliamente utilizado en sistemas de control automático para mantener una variable
Similar a Un controlador PID (Proporcional, Integral, Derivativo) o dispositivo de control ampliamente utilizado en sistemas de control automático para mantener una variable (20)
Último
Último (20)
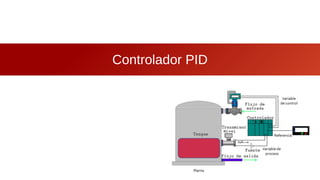
Un controlador PID (Proporcional, Integral, Derivativo) o dispositivo de control ampliamente utilizado en sistemas de control automático para mantener una variable
- 2. Introducción ● Es el más popular de los controladores industriales. ● La primera aparición comercial del controlador PID data de 1936 en la empresa Taylor Instruments Co. ● A partir de ahí, este controlador ha permanecido en la industria hasta hoy en día, en una gran variedad de versiones y uso de tecnologías
- 3. Acción proporcional ● El control proporcional es un controlador sencillo cuya ley de control dice que la manipulación es proporcional al error: u(t) α e(t) u(t) = Kc e(t) Si aplicamos la transformada de Laplace a la ecuación anterior se obtiene: U(s) = Kc E(s) ● Por lo que la estructura del diagrama a bloques de un controlador P aislado sería:
- 4. Acción proporcional ● Desventajas: – El error de estado estacionario, – Nunca lleva la respuesta al valor deseado ● Mientras más grande sea el valor de Kc , más rápido y más cerca de la referencia; sin embargo, ninguna de las respuestas llega al valor de referencia exacto, existiendo así un error de estado estacionario, sin importar cuán grande sea Kc
- 5. Acción integral ● Es uno de los más utilizados. ● La ley de control consiste en integrar el error: ● Donde Ki es la constante de integración que típicamente se define como constate de tiempo de integración Ti. ● Aplicando la transformada de Laplace a la ecuación:
- 6. Acción integral ● La señal de salida de un proceso de primer orden, ante una entrada de tipo escalón unitario y un controlador integral, responde como un proceso de segundo orden. ● Para valores de Ti pequeños el controlador tenderá a ser oscilatorio; mientras que para Ti grandes la respuesta será más lenta, pero con un sobrepaso más suave (o inclusive sin sobrepaso). ● Ventajas: – Garantía de estabilidad ante cualquier valor de Ti. – Evasión del error de estado estacionario. ● Desventajas: – Genera oscilaciones en la salida
- 7. Acción derivativa ● La acción derivativa genera una manipulación con base en la derivada del error, es decir: ● La acción derivativa NO se utiliza de manera independiente para controlar procesos, ya que no se puede controlar sin la ayuda de un proporcional (P) o un integral (I)
- 8. Acción derivativa ● El controlador D no puede controlar un proceso sometido ante cambios en referencia tipo escalón, a menos que el proceso ya cuente con un integrador. ● La acción derivativa solo reacciona cuando hay cambio de error. ● Gracias a la derivada, cuenta con factor de predicción del valor futuro del error. ● La magnitud de la constante derivativa Td nos dice qué tanto queremos proyectar en el tiempo la estimación de la pendiente. Por tanto, para valores de Td pequeños, la estimación será más certera; y para valores grandes, la estimación puede alejarse del valor real. ● No es recomendable utilizar la acción derivativa en procesos con ruido o que presenten oscilaciones de alta frecuencia, esto debido a las estimaciones erróneas de la pendiente del error con que se pueden generar
- 9. Acción Proporcional e Integral (PI) ● El controlador PI es considerado el controlador ideal porque las acciones proporcionales (P) e integrales (I) suman sus virtudes y compensan sus defectos (Rosas, 2011). ● Debido a esto podemos obtener un controlador rápido (gracias a la acción proporcional), y sin error de estado estacionario (por la acción integral). La estructura básica del controlador PI es la siguiente: ● Ésta es la suma aritmética de las acciones proporcionales e integrales (en el dominio de s). No obstante, existe una modificación a la estructura del PI para hacer que responda aún más rápido; ésta consiste en que la ganancia proporcional multiplique a toda la ecuación, y queda lo siguiente: ● A esta estructura se le conoce como PI ideal
- 10. Acción Proporcional e Integral (PI) ● Ell controlador PI permite obtener una respuesta rápida y sin sobrepaso ● Ventajas del controlador PI son las siguientes: – Controla cualquier proceso lineal. – Es sumamente estable y rápido. – Con sólo 2 parámetros es sencillo de ajustar. ● Desventajas: – Batalla para controlar procesos no lineales – Son buenos en regulación, pero ante perturbaciones pueden ser lentos
- 11. Acción proporcional, integral y derivativa (PID) ● Combina las tres acciones de control, tanto las virtudes como los defectos de cada uno de ellos se suman, y esto puede acarrear beneficios en la operación y problemas serios de inestabilidad (Fernández del Busto y Ezeta, 2013). ● El problema de la selección adecuada de los tres parámetros es tema de estudio de la siguiente sección. ● Funciona tan bien como un controlador PI, pero agrega un factor de predicción del error, gracias a la acción derivativa. ● El PID puede presentar problemas al controlar procesos con ruido u osciladores de alta frecuencia. La estructura básica del PID es la siguiente:
- 12. Acción proporcional, integral y derivativa (PID) ● Esta última función introduce al sistema un polo en el origen (por la acción integral) y dos ceros, los cuales pueden ser reales o complejos. Esto hace que la respuesta de un sistema con controlador PID tenga una gama infinita de posibilidades en cuanto a su respuesta (Ver figura 8), y complica la selección de cada uno de los parámetros característicos de éste. ● Esta situación ha dado origen a un sinfín de técnicas de sintonización para estos controladores, desde métodos de prueba y error hasta métodos analíticos y heurísticos de propietarios de empresas del ramo de control de procesos (Fernández del Busto y Ezeta, 2013).
- 13. Método de Ziegler-Nichols ¿Cuáles serían los valores de Kc, Ti y Td que logren que la respuesta Y(s) iguale a R(s) con el desempeño deseado? ● La sintonización correcta de los controladores PID representa una herramienta para ayudar a aumentar la productividad de una empresa
- 14. Ziegler-Nichols. Primer método. ● La respuesta de la planta a una entrada escalón unitario se obtiene de manera experimental ● Este método se puede aplicar si la planta no contiene integradores ni polos dominantes complejos conjugados, la curva de respuesta escalón unitario puede tener forma de S. ● La curva con forma S se caracteriza por: el tiempo de retardo L y la constante de tiempo T.
- 16. ● Se le conoce como método de ganancia última de Ziegler-Nichols. ● Consiste en llevar la respuesta del proceso al límite de la estabilidad, es decir, cuando la respuesta oscila con amplitud y periodo constantes ● La ganancia que produce esta oscilación se designa como ganancia crítica Kcr, y al periodo de la oscilación se le llama periodo crítico Pcr. Con base en estos dos parámetros se puede sintonizar un controlador PID. ● Las fórmulas para sintonizar controladores P, PI y PID son las siguientes: Ziegler-Nichols. Segundo método
- 18. ● Se muestra un esquema de control de nivel con función de transferencia Gp(s) desconocida y no se dispone de información para determinarla. ● Se desea que, ante una entrada escalón unitario, a) La respuesta de lazo cerrado no presente error alguno. b) Su tiempo de establecimiento al 2% no exceda los 7.5seg. y c) Un sobre-paso menor al 10%. ● La única información disponible es la variación de la altura h(t) que presentó una respuesta como laque se muestra cuando el caudal Qe(t) tuvo una variación del tipo escalón unitario. Ejemplo. Primer método
- 19. ● De acuerdo a la respuesta del sistema se utilizará el primer método de sintonización de Ziegler-Nichols. ● De la imagen se puede obtener los valores de: – L = 0.25s – T = 2.25s-0.25s=2s ● Sustituir y determinar la función de transferencia del controlador Ejemplo. Primer método
- 20. ● Respuesta a varias combinaciones de controladores Ejemplo. Primer método
- 21. ● Respuesta para los controladores: – P (Rojo) – PI (Amarillo) – PID (Café) – PID Sintonizado y ajustado (punteado) Ejemplo. Primer método
- 22. ● Se desea determinar la función de transferencia de un sistema el cual presenta la siguiente respuesta. (verde) ● Se desea que, ante una entrada escalón unitario, a) La respuesta de lazo cerrado no presente error alguno. b) Su tiempo de establecimiento al 2% no exceda los 5seg. y c) Un sobre-paso menor al 10%. Ejemplo. Segundo método
- 23. ● Se determina la ganancia crítica y el perdido crítico. (rojo) – KCR = 3.8 – PCR = 1.4s ● A partir de los valores determinar las ganancias para cada controlador Ejemplo. Segundo método
- 24. Ejemplo. Segundo método Proporcional Proporcional Integral PID (Sintonizado) PID (sintonizado y ajustado)
- 26. ● Se desea determinar la función de transferencia de un sistema el cual presenta la siguiente respuesta. (verde) ● Se desea que, ante una entrada escalón unitario, a) La respuesta de lazo cerrado no presente error alguno. b) Su tiempo de establecimiento al 2% no exceda los 5seg. y c) Un sobre-paso menor al 10%. Ejercicio. Segundo método