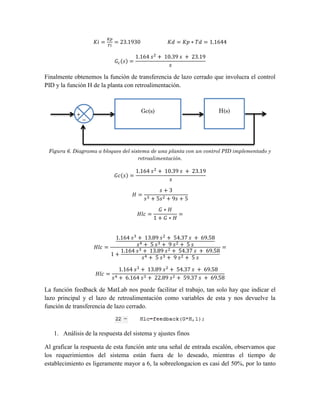
Este documento describe dos métodos para sintonizar controladores PID basados en las reglas de Ziegler-Nichols. El primer método usa la respuesta escalón de la planta para determinar el retardo y constante de tiempo. El segundo método incrementa la ganancia hasta que la salida oscile de forma sostenida, determinando así la ganancia y periodo críticos. Ambos métodos proveen valores iniciales para los parámetros del PID que luego pueden ajustarse más finamente.