Descargado 10 veces

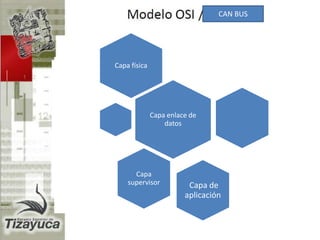

CAN es un protocolo de comunicaciones desarrollado por Bosch para aplicaciones automotrices que define capas para la transmisión de datos, enlace, supervisión y aplicación. Soporta prioridad de mensajes, tiempos de latencia bajos, configuración flexible, detección y corrección de errores y comunicación multimaestro/multicast.



































































