Descargar como PDF, PPTX


















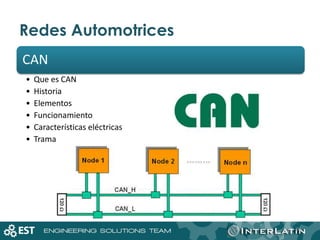





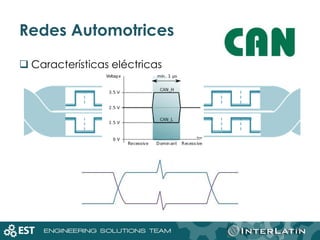





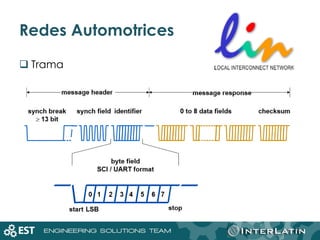










Este documento trata sobre las redes automotrices CAN, CANFD y LIN. Explica que la electrónica juega un papel cada vez más importante en la industria automotriz, con un aumento dramático en la cantidad de código de software en los vehículos. También describe los conceptos de multiplexado y las clases de multiplexado utilizadas en los automóviles. Luego, proporciona detalles sobre CAN y LIN, incluida su historia, elementos, funcionamiento y características. El documento concluye invitando a un curso sobre re












![caja-de-cambios-mecanica[1]](https://cdn.slidesharecdn.com/ss_thumbnails/53553037-caja-de-cambios-mecanica1autoguardado-121125235315-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)




























































































