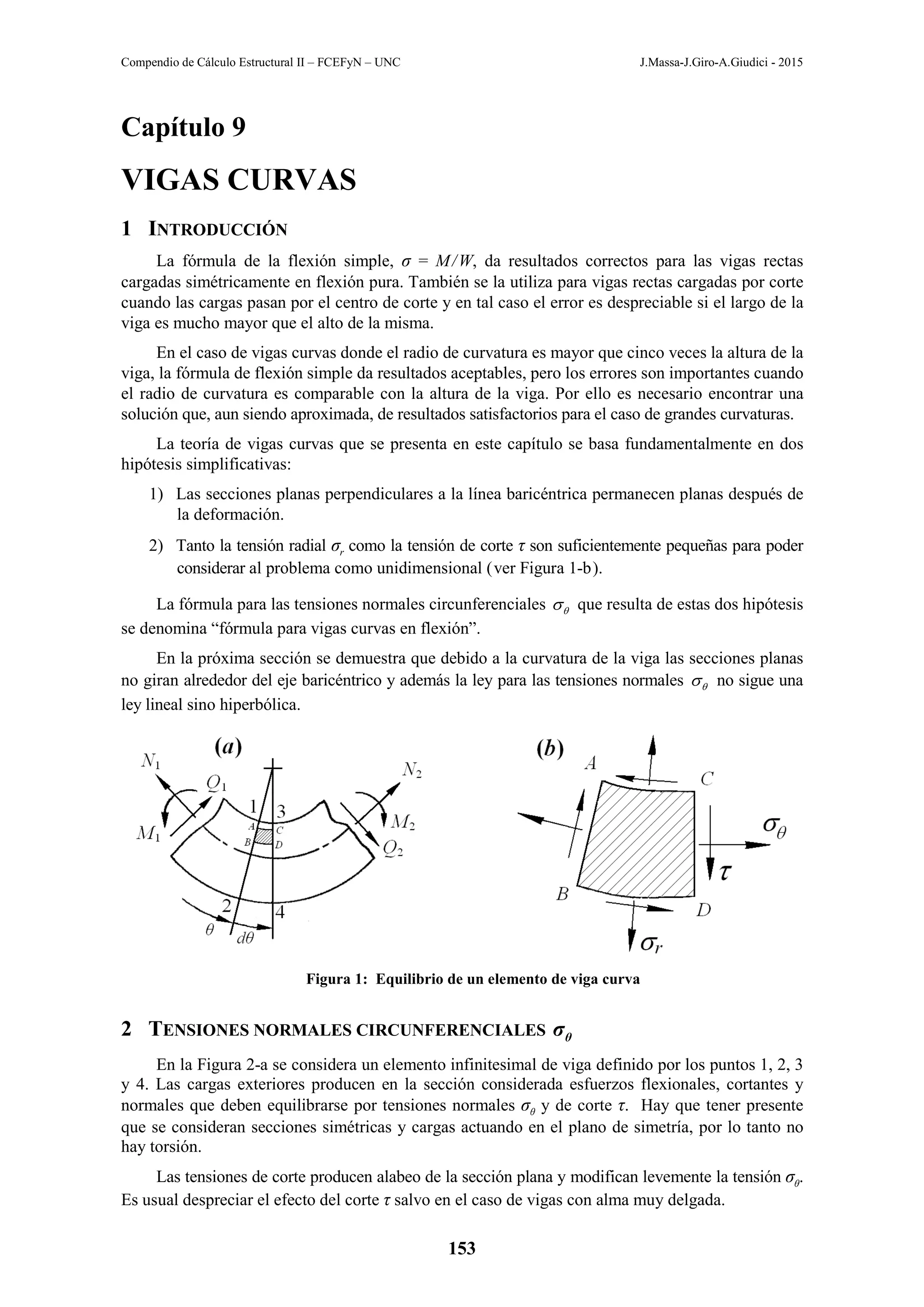
Este documento trata sobre vigas curvas y presenta la teoría y fórmulas para calcular las tensiones normales en vigas curvas. Introduce la fórmula de la flexión compuesta para vigas curvas, la cual da como resultado una variación hiperbólica de las tensiones circunferenciales debido al término 1/r. También cubre cómo calcular el área modificada y la ubicación del eje neutro, y explica brevemente cómo se calculan las tensiones radiales.










![Compendio de Cálculo Estructural II – FCEFyN – UNC J.Massa-J.Giro-A.Giudici - 2015
164
PRÁCTICO Vigas curvas
Nota: Todos los datos están dados en unidades [cm] y [kg]
1 Determinar el coeficiente de seguridad del gancho del
croquis para una carga máxima de 6000 kg.
Comparar el resultado obtenido con la teoría de viga
curva con el correspondiente a viga recta.
Material: acero σf = 2800 kg/cm2
2 Calcular el desplazamiento vertical del punto A debido a
la carga F que produce fluencia.
Aro con un radio medio de 4 cm.
Material: acero σf = 2800 kg/cm2
Comparar resultados considerando viga curva y viga recta.
3 Determinar el coeficiente de seguridad
de la prensa del croquis para una carga
máxima de 1200 kg.
Material: acero σf = 3420 kg/cm2
Ayuda: Emplear corrección de Bleich
y calcular la tensión circunferencial
en el punto A.
4 Un codo de 90º sin presión interior empotrado en el extremo A
tiene una carga perpendicular a su plano en el extremo libre B.
Espesor: t = 0,2 cm Material: acero σf = 4000 kg/cm2
Se pide:
a) Calcular la máxima carga admisible con CS = 2
b) Repetir el cálculo ignorando la ovalización del codo
(usando teoría de viga recta).
c) Comparar los resultados obtenidos.
5 Para calcular la matriz de rigidez de un codo se comienza calculando la matriz de flexibilidad
para un extremo libre considerando el otro extremo como empotrado.
11 12 13 1 1
21 22 23 2 2
31 32 33
F F F P u
F F F P u
F F F M φ
=
Material: acero E = 2100000 kg/cm2
ν = 0,3
Calcular F31 empleando el teorema de Castigliano.
a) Codo sin presión interior.
b) Codo con presión interior p = 40 kg/cm2
Ayuda: Considerar teoría de vigas rectas teniendo
en cuenta la pérdida de rigidez por ovalización a
través de Io dado por la ecuación (30). R = 12 rm = 4 t = 0,2](https://image.slidesharecdn.com/cap-09vigas-curvas153-168v7-210423035700/75/Cap-09-vigas-curvas-153-168_v7-12-2048.jpg)
![Compendio de Cálculo Estructural II – FCEFyN – UNC J.Massa-J.Giro-A.Giudici - 2015
165
SOLUCIÓN del PRÁCTICO Vigas curvas
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
Nota: Todos los resultados parciales y finales se dan unidades [cm] y [kg]
1 Cálculo del coeficiente de seguridad de un gancho para una carga de 6000 kg.
1.a Solución exacta como viga curva
Propiedades: Tabla 2 caso 3...... 12 (8 2)/2
A
= +
x ................................ A = 60
[ ] [ ]
6 (2 8 2) 1 8
(8 2 2) 3 (8 2)
R
= + + + +
/
x x x x x ................................ R = 10,8
( )
8 18 2 6 ln(18/6) 12 8 2
m
A
= − − +
/
x x x .............................. Am = 6,0847352
Ec. (14) →
6000 6000 10,8 1 6,0847352
60 10,8 6,0847352 60 6 60
θ
σ
=
+ −
−
x
x
....... 839,9
θ
σ =
/ 2800/839,9 3,33
S f
C θ
σ σ
= = = ................................................ 3,33
S
C =
1.b Solución aproximada con viga recta
3 2 2
1 2 1 1 2 2 1 2
12 ; 8 ; =2 ; ( 4 ) [36 ( )] 633,6 ;
h b b I h b b b b b b
= = = + + + =
/ 6000 10,8 64800
M
= =
x
6000 64800
(10,8 6) 590,9
60 633,6
A
σ = + − =
+
6000 64800
(18 10,8) 636,4
60 633,6
B
σ = − − =
− 636,4
máx
σ =
/ 2800/636,4
S f máx
C σ σ
= = ............................................................................................. 4,40
s
C =
La tensión máxima como viga recta es 24 % menor, tiene signo opuesto y ocurre en un punto distinto.
2 Determinación del desplazamiento vertical del punto A causado por la carga que produce fluencia.
2.a Carga que produce fluencia
Propiedades: Tabla 2 caso 4.....b = 0,5 → 2 2
(0,5)
A b
π π
= = x .......... A = 0,7854
R = 4................................................................................................................ R = 4
2 2 2 2
2 2 4 4 (0,5)
( ) ( )
m
A R R b
π π
= − − = − − ................... Am = 0,1971226
Ec. (14) →
3,5
4 1 0,1971226
0,7854 4 0,1971226 0,7854 3,5 0,7854
r
F F
θ
σ =
− −
=
+ −
−
x
x
... 46,23 F
θ
σ = −
46,23 ; 2800 ;
máx f máx f
F
θ
σ σ σ σ σ
= = = = ⇒ 60,57
F kg
=
Se puede verificar que la fórmula para vigas rectas predice F = 66,64 kg, con un error del 10 %.
2.b Cálculo del desplazamiento del punto A
Esfuerzos: ; ; ( )
z
Q F cos N F sen M F R sen
θ θ θ
==
− =
−
Ec. (40) →
2 2
2
( ) ( )
2 2
( ) ( )( )
2 ( )
c
m
m
F cos F sen
W Rd Rd
A G AE
A F R sen F R sen F sen
d d
AE RA A AE
θ θ
θ θ
θ θ θ
θ θ
−
= + +
− − −
−
−
∫ ∫
∫ ∫
0,385 ; 0,85 ;
2(1 )
c
E
G E A A
ν
= = =
+
2
2 2 2
0
255 2
0,85 0,385
W F R cos
sen sen sen d
F E A
π
θ
θ θ θ θ
∂
= + + −
∂
∫ x
[ ]
2 2
0 0
; 3,05 1 255 2
2 2
W F R
sen d cos d
F E A
π π π π
θ θ θ θ
∂
= = = + + + −
∂
∫ ∫
corte normal flexión acople
( )
60,57 4
257,05 0,0593
2 2100000 0,7854
F
W
u
F
π
∂
= = =
∂
x x
x
x x
....................................... 0,0593
F
u cm
=
Es importante destacar que usando la teoría de viga recta con una carga P = 60,57 kg se
obtiene un desplazamiento uF
= 0,060 cm con un error de apenas el 1,2 %. Esto confirma
que el efecto de viga curva en los desplazamientos es mucho menor que en las tensiones.](https://image.slidesharecdn.com/cap-09vigas-curvas153-168v7-210423035700/75/Cap-09-vigas-curvas-153-168_v7-13-2048.jpg)
![Compendio de Cálculo Estructural II – FCEFyN – UNC J.Massa-J.Giro-A.Giudici - 2015
166
3 Cálculo del coeficiente de seguridad de una prensa para carga máxima de 1200 kg.
3.a Corrección de las alas usando la corrección de Bleich, ecuación (23)
Ec. (26) →
2 2 2 0,25
[3 (1 0,3 )/(7,2 0,8 )] 0,535586
2 2 0,535586 0,7 0,749821
z
λ
λ
=
− =
= = =
x x
x x
Ec. (25) →
0,9961
0,2421
β
α
=
=
Ec. (23) → ( )
1 1 1
2 2 (0,9961 0,7) 1,2
b t
α
′
= +
= +
x x
........................ 1 2,5945
b′ =
Ec. (26) →
2 2 2 0,25
[3 (1 0,3 )/(2,9 1,4 )] 0,637937
2 2 0,637937 1,2 1,5310
z
λ
λ
=
− =
= = =
x x
x x
Ec. (25) →
0,9381
0,9244
β
α
=
=
Ec. (23) → ( )
2 2 2
2 2 (0,9381 1,2) 1,2
b t
α
′
= +
= +
x x
...................... 2 3,4514
b′ =
3.b Cálculo del área A, del área modificada Am y del radio R de la sección reducida
1 2,5945 0,8 2,0756
A
= =
x 2 1,2 3,2 3,84
A
= =
x
1
7,6
2,5945 0,288575
6,8
m
A ln
= =
x 2
6,8
1,2 0,763186
3,6
m
A ln
= =
x
( )
1 6,8 7,6 / 2 7,2
R = + = ( )
2 3,6 6,8 / 2 5,2
R = + =
Propiedades de la sección compuesta
3 3,4514 1,4 4,8320
A
= =
x 1 2 3 10,7476
A A A A
= + + =
3
3,6
3,4514 1,699733
2,2
m
A ln
= =
x 1 2 3 2,751494
m m m m
A A A A
= + + =
( )
3 2,2 3,6 / 2 2,9
R = + = 1 1 2 2 3 3
( ) 4,55219
R A R A R A R A
= + + =
/
3.c Cálculo de las tensiones variables en el espesor
Esfuerzos:... 1200
N kg
= 1200 (7,3 4,55219)
M
= +
x ......... 14222,63 -
M kg cm
=
Ec. (14) →..
1200 14222,63 1 2,75149
10,7476 4,5522 2,751494 10,7476 10,7476
r
r
θ
σ
=
+ −
−
x
..
8000,4
1936,5
r
θ
σ =
− +
Tensión transversal: Ec. (24) → z θ
σ β σ
= − Punto 1: 2,9
1 0,9244 760
z r
θ
σ σ =
=
− =
−
x
Punto 7: 7,2
7 0,2421 200
z r
θ
σ σ =
=
− =
x Tensión de von Mises * 2 2
z z
θ θ
σ σ σ σ σ
= + −
Ala superior Alma Ala inferior
Punto 1 2 3 4 5 6 7 8 9
r 2,2 2,9 3,6–ε 3,6+ε 4,132 6,8–ε 6,8+ε 7,2 7,6
σθ
1700 822 286 286 0 – 760 – 760 – 826 – 884
σz
– 760 0 760 0 0 0 200 0 – 200
σ*
2181 822 665 286 0 760 878 826 803
3.d Gráfico de las tensiones
3.e Determinación del coeficiente de seguridad
/ 3420/2181 1,57
S f
C θ
σ σ
= = = .................................................................................. 1,57
S
C =](https://image.slidesharecdn.com/cap-09vigas-curvas153-168v7-210423035700/75/Cap-09-vigas-curvas-153-168_v7-14-2048.jpg)

![Compendio de Cálculo Estructural II – FCEFyN – UNC J.Massa-J.Giro-A.Giudici - 2015
168
5Cálculo de un elemento de la matriz de flexibilidad de un codo como viga curva.
El elemento F31 de la matriz de flexibilidad es igual al
giro φ en radianes producido por una carga unitaria
horizontal de valor unitario: P1 = 1 kg.
Para resolver empleando el teorema de Castigliano se
coloca un momento ficticio Mo en el extremo libre que
se anula después de derivar.
1 sen
Esfuerzos: 1 cos
(1 cos )
o
Q
N
M M R
θ
θ
θ
=
=
= − −
Área de la sección plana de pared delgada: 2 2 4 0,2
m
A t
r
π π
= =
x x x x x x .................... 5,03
A =
Relación geométrica adimensional λ de la viga curva:
Ec. (32) →
2 2 2 2
/ 1 12 0,2 / 4 1
( ) ( )
m
Rt r
λ ν ν
= − = −
x ....................................... 0,15724
λ =
Disminución de la rigidez Ωo :
Ec. (33) → 1 0,6 0,6 0,15724
λ Ω λ
< → = =
o x x .................................................... 0,09434
Ω =
o
Comentario
Momento de inercia nominal
: como la curvatura es elevada [R/(2rm ) = 1,5] y el espesor es pequeño (t <<rm ) el
efecto perjudicial de la ovalización es muy importante y la flexibilidad aumenta más del 1000 % !!!
nom
I y reducido Io :
Ec. (30) →
3 3
4 0,2
nom m
I r t
π π
= = x x ............................................................................. 40,21
nom
I =
Ec. (30) → 0,09434 40,21
nom
I I
Ω
= =
o o x ..................................................................... 3,794
I =
o
5.a Flexibilidad del codo sin presión interior
Energía de deformación elástica:
Ec. (40) y (42) →
[ ] [ ]
2
2 2
(1 cos ) (1 cos ) cos
sen cos
2 2 2
o o
c
M R M R
W Rd Rd Rd d
A G AE E I AE
θ θ θ
θ θ
θ θ θ θ
− − − −
= + + −
∫ ∫ ∫ ∫
o
Derivada de la energía de deformación respecto al momento ficticio:
/2 /2
o
o 0 0
(1 cos ) cos
0 0
M R
W
Rd d
M EI AE
π π
θ θ
θ θ
− −
∂
= + + −
∂ ∫ ∫
o
2
/2 /2 5
31 0 0
o o 0
1
sen sen ( 1,0276 0,0095) 10
M
W R
F
M EI E A
π π
θ θ θ
−
=
∂
= =
− − − =
− −
∂
o
o
x
5
31 1,04 10 /
F rad kg
−
= −
o
x
5.b Flexibilidad del codo con presión interior
El único cambio respecto al caso 5.a es el incremento de la rigidez por el efecto estabilizante de la
presión interior aplicada al codo. Esto se traduce en un incremento del momento de inercia
reducido lo que disminuye de manera inversamente proporcional la deformación por flexión.
Parámetro adimensional de presión ψ:
Ec. (39) → ( )
2 2
/ 40 12 /(2100000 4 0,2)
m
p R E r t
ψ
= = x x x ..................................... 0,003429
ψ =
Incremento de rigidez Ω :
Ec. (35) →
0,25
1,333 1,15 0,003429
1+1,75 (0,15724) 1,178
e
−
− −
Ω =
x
x x → I I
Ω
= o
p ← 1,178
Ω =
La rigidez del codo aumenta un 18 % debido a la presión interior que es estabilizante, en consecuencia:
5 5
31 ( 1,0276/ 0,01) 10 ( 1,0276/1,178 0,0095) 10
F Ω − −
=
− − =
− −
p
x x ....
5
31 0,882 10 /
F rad kg
−
= −
p
x
R = 12 rm = 4 t = 0,2](https://image.slidesharecdn.com/cap-09vigas-curvas153-168v7-210423035700/75/Cap-09-vigas-curvas-153-168_v7-16-2048.jpg)
























































