Este documento presenta un libro de problemas resueltos de teoría de máquinas y mecanismos. El libro contiene cinco capítulos que cubren temas como conceptos básicos, cinemática, dinámica, resistencias en máquinas y engranajes. El objetivo del libro es complementar y ampliar los aspectos teóricos de estas asignaturas a través de problemas resueltos que van desde lo más sencillo hasta aplicaciones más complejas.


![-rHoIVlsofl =---+--'"
Problemas resueltos de teoría de máquinas y mecan¡smos
Juan Carlos García Prada, Cristina Castejón Sisamón e Higinio Rubio Alonso
rente Ed¡tor¡al Area Universitaria
:: l:r¡ella Hierro
iora de Producción:
' . '.'' 7e la Fuente Roio
:'i GHT O 2007 International
:-s:r Editores Spain
:- -'¡. S.A.
:: ,:xes, 25; 280'15 Madrid
:': -: 91 4463350
' : -4302 ló
:-::s ]paraninfo.es
,., ::'aninfo.es
:':s: en España -::: n Spain
:'. 378-84-9732-495-3
: : s :o Legal: M-14.125-2007
Diseño de cubierta:
fuo*yto,,
Preimpresión:
Copibook
lmpresión:
Top Printer Plus, S.L.L.
c/ Puerto de Guadarrama, 48
Polí9. Ind. Las Nieves
28935 lvlóstoles (Madrid)
Reservados los derechos para
todos los países de lengua espa-ñola.
De conformidad con lo dis-puesto
en el artículo 270 del Códi-go
Penal vigente, podrán ser casti-gados
con penas de multa y píva-ción
de libertad quienes reprodu-jeren
o plagiaren, en todo o en
parte, una obra l¡teraria, artística o
científica fijada en cualqu¡er tipo
de soporte sin la precept¡va auto-rización.
N¡nguna parte de esta
publicación, incluido el diseño de
la cubierta, puede ser reproduct-da,
almacenada o transmitida de
ninguna forma, ni por ningún me-d¡
o, sea éste electrónico, químico,
mecánico, electro-ópt¡co, graba-c¡
ón, fotocop¡a o cualquier otro,
sin la previa autorización escrita
por parte de la Ed¡torial.
Otras delegac¡ones
"., :r , Centroamérica -. aa1 281 29 AG :. ::a 281-26-56
: . ::s ¡mar . nternet.com.mx
: - '-:i j.thomsonlearn ng.com mx .,:':: DF
-: -a7 758-7s-80 y 81 .: -a7 1581573 ' -:--..Ocoqui.net
-:-- ::42 531-26-41 ::, aa2l 524 46 88
::. :9.-Onetexpress.cl
Cost¿ Rica
EDISA
Tel.lFax (506) 235 89-55
edisacr@sol.racsa.co.cr
San José
Colombia
Tel. (571) 340-94'70
Fax (571) 340 94 75
clithomson@andinet.com
Bogotá
Cono Sur
Pasaje Santa Rosa,5141
C.P 141 -Ciudad de Buenos Aires
Tel. a833 3838/3883'4831 0764
thomson@thomsonlearning.com,ar
Repúblic¿ Dominicana
Caribbean ¡/arketing Services
Tel. (809) 533-26-27
Fax (809) 533 18'82
cms@codetel.net,do
Boiivia
Librerias Asocradas, S.R.L.
Tel.iFax (591) 2244 53 09
libras@datacom-bo.net
Ediciones Ramville
Iet. $A2l 193-24 92 y 182'29-21
Fax (582) 793 65-66
tclibros@aüglobal.net
El Salvador
The Bookshop, S.A de C.V
fel. (503) 243 70-17
Fax (503) 243 12 90
amorales@sal.gbm.net
San Salvador
Guatem¿la
Textos, S.A.
Tel. (502) 368 01 48
Fax {502) 368-15-70
textos@infovia com.gt
Guatemal¿](https://image.slidesharecdn.com/capitulo1-141118204822-conversion-gate01/85/Capitulo-1-me4canismo-4-320.jpg)

![l"tdtce de mater¡as
)APITULO 3. Cinemática de máquinas ...
3.1. lntroducción
3.2. Determinación de los centros instantáneos de rotación (CIR) .
3.2.1. Teorema de los tres centros
3.3. Técnic¿rs nara la determinación de velocidades .
3.3.1. Métoclo de las velociclacles relativas
3.3.2. Método de proyección o componente axial
3.3.3. Cinema de velocidades. Homologías ...
3.4. Técnicas para la determinación de aceleraciones
3.4.1. Estudio de las aceleraciones relativas
3.4.2. Cinema de aceleraciones. Homologr¿rs
41
48
52
55
58
58
59
60
64
66
68
Problemas resueltos 1l
)APíTULO 4. Dinámica de máquinas ... l0l
4.1. lntroducción 102
4.2. Equivalencia dinámico-ener-eética de un nrecanisrno de un grado de libertad ..... 103
4.2.1 . Fuerza reducida 103
+.1.2. Mrse retlueidu 10.+
4.2.3. Fuerza equilibrante ¿.s. tuerza reducicla 105
,+.3. E,sflrerzos de inercia en rnecanismos . . . I l0
Problenlas rcsueltos lll
)APITULO 5. Engranajes
5. l. Introducción
-5.2. Clasificación de los engrarrajes
-5.3. Nomenclaturii . .. .
-5.,+. Perfiles conjugados
5.-5. El oerfll de evolvente
-5.-5.l. La función evolvente
r -5.6. Nonnaliz¿tción de los englartajes
5.1 . lnterf'erencia v número límite de dientes
5.8. Procedimientos de talla para evitar la penetración
-5.8.1. Vanación del ángulo de inclinación del flanco de la cremallera .
-5.8.2. Rebaiado del dentado de la cremallera
-5.8.3. Desplazamiento de la cremallera de talla
Espesor del diente
Longitud de engrane. Grado de recubrirniento .
-5.10. l. Longitud de engrane y arco de conduc'ción ...
5.10.2. Grado de recubrimiento o coetlciente de engrane
Montaje de los en-eranajes
5.1 l.l. Distancia entre ejes de funcionamiento
Verificación de las dimensiones de los engranajes
Trenes de engranajes
5.13.1. Clasificación de los trenes de engranajes
5.13.2. Diserio de trenes de engranajes . . . . .
-5. l-1.i. Tlenes de engranrje: epicicloidalcs . . .
-5.9.
5.10.
5.11.
5.t2.
-5.13.
Problemas resueltos 221
]IBLIOGRAFIA
NDlCE ANALíTICO
. TES-Paraninfo
16-5
r66
1ó6
161
112
l7-5
116
t7l
r80
182
182
r83
184
r88
r90
r90
l9l
r93
191
205
206
201
208
2t3
28-5
281](https://image.slidesharecdn.com/capitulo1-141118204822-conversion-gate01/85/Capitulo-1-me4canismo-6-320.jpg)



















![: -:: .^ a la Teoría de Máauinas v Mecanismos
La aplicación del Teorema de Grashof al mecanismo biela
Jr!)nes -seométricas de funcionamiento (aéctse la Figura 1.20).
manivela. permite obtener las condi-
Figura 1.20. Clasificación según el Teorema Grashof del cuadrilátero articulado.
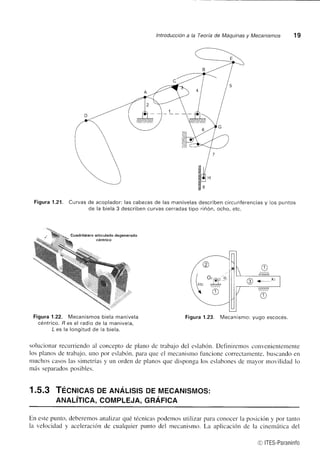
1.5.2. Cunvls DE BIELA. CunvnS DE ACOPLADOR
Es de gran interés para el uso del cuadrilátero articulado en maquinaria analizar el comportamiento de
los rnovimientos de puntos de los diferentes eslabones constitutivos. Sobre el movimiento en las mani-velas
y el eslabón sopofie poco hay que decir, pero en cuanto al movimiento de los puntos de la biela y
del plano de trabajo asociado a ella se observa su gran complejidad. Podemos observar distintas f'ami-lias
de curvas: curvas lobulares de dif'erente cornplejidad. curvas con tramos casi rectilíneos, etc. Exis-ten
¿rtlas de curvas de biela o de acoplador que nos permiten seleccionar la geometría del cuadrilátero
articulado que nos procura la curva más aproximada a la deseada. En la Figura l.2l se presenta un
mecanrsmo con las curvas de acoplador de una serie de puntos de diferentes eslabones.
Una aplicación muy interesante del cuadrilátero articulado es aquella que resulta de hacer la
rnanivela de salida de longitud infinita (degeneración de la manivela) y su conversión en una desli-zadera
rectilínea. El movimiento resultante de la biela se puede estudiar mediante los dos puntos
extrerros. El punto de la biela articulado con la manivela de entrada describe círculos. mientras que
el punto articulado con la deslizadera result¿inte de la degeneración describe una recta. Si la anterior
recta la alineamos de nranera que pase por el eje de entr¿rda y la deslizadera, esta última describe un
movimiento muy cercano al annónico. la componente arrnónica depencle del factor Rr.2l siendo R
cl radio del eje de entrada y L la longitud de la biela (rác.se la Figura 1.22).Para obtener un movi-rniento
annónico deberemos hacer lo rnás pequeño posible el factor anterior. un rnecrnismo que
cumple lo anterior es el denominado yugo escocés. en el clue la biela se hace de longitud infinita
(réase la Figura I .23).
Interferencia entre eslabones. Montaje
El estudio geométrico del movimiento realizado no considera los problemas del montaje de los
mecanismos. Uno de los primeros problemas con que se encuentra uno al intentar materializar el
mecanismo desarroll¿ido es el de los cruces o interferencias entre los eslabones v eso lo deberemos
S-raraninfo
¿BAnRAS
SPI-]F9TA9
r{!uAtr 5?
rlre URE t¡A tr!:
¿LÁ SARRA
i,1Ft'l0R F:
Lq f IJAl
¿LA B'.RÉA
FÍ
'dEI.]OR
aoilfrcu.{ ¡.](https://image.slidesharecdn.com/capitulo1-141118204822-conversion-gate01/85/Capitulo-1-me4canismo-26-320.jpg)
![-:':J-cción a la Teoría de Máquinas v Mecanismos
.tilido rígido a los mecanismos es el cuerpo de conocimientos a aplicar. pero en Teoría de Máqui-nas
v Mecanismos vamos a desarrollar una serie de conceptos y técnicas que nos permitan un mhs
fácil y' rápido análisis y solución del estado de movimiento de cualquier eslabón y punto del meca-nisrlo.
La utilización del cálculo de vectores para definir la posición de los eslabones de un mecanis-nto.
así como. de las velocidades y aceleraciones. nos permite considerar dos grupos de técnic¿rs:
lrs analíticas y las gráficas.
Las técnicas analíticas vectoriales utilizan el análisis',,ectorial de los bucles cerrados de los
e slabones del mecanismo para obtener ecuaciones vectoriales de la movilidad del mecanismo. De
los sisterl¿rs de ecuaciones vectoriales planteados podemos pasar a sus correspondientes sistemas
dc ecuaciones escalares que mediante su resolución nos pemitan obtener las características de los
eslabones incógnita en función de los datos de la geometría del mecanismo.
Técnicas analíticas
Valt'tos a aplicar lo anterior al caso de un mecanismo fundamental, el cuadrilátero articulado, se-cún
la Figura 1.2r1.
Figura 1.24. Representación vectorial de un mecanismo de cuatro barras
Siguiendo como referencia la notación utilizada, se observa que, evidentemente, la suma de l¿is
provecciones de las componentes vectoriales en el eje X debe ser cero:
L,.cosz-|L.'cosf Lj.cosó+Lr-0 (l.l)
Además. la suma de las proyecciones de las componentes vectoriales en el eje I tarnbién debe
ser cero:
X
----_>
l,, .sen y" * L..cos / Lj.cos ó - 0
Si las Ecuaciones (l.l) y (1.2) se reorganizan y se elevan al cuadrado resulta:
tl . cos2 lJ -- (h.cos @ L, .cos t La)2
L].sen] ll : (h.sen / - L, .sen z)2
Si las Ecuaciones (l 3) y (l.zl) se suman, el resultado sería:
: fi+ fl+ | L1.Lr.cos (> L,.Lt.cosz.cos ó- L,.L.,.sen t.sen Q- L,.
(1.2)
(l 3)
(l ,l)
-::- )araninfo
L*'cosa (1.-5)](https://image.slidesharecdn.com/capitulo1-141118204822-conversion-gate01/85/Capitulo-1-me4canismo-28-320.jpg)



![ltroducc¡ón a la Teoría de Máquinas v Mecanismos
> 1 .2. Calcular el núunero de grados de libertad del mecanismo de la Fisura L27.
Figura 1.27. Mecanismo pistón.
Resolucrótr¡
Se aplicará la fórmula de Grübler para el cálculo del número de grados de libertad del nrecanismo.
GDL : 3(N l) 2Pr - P, (Fórmula de Kutzbach Gruebler. 2D)
Se calculan el número de pares de uno y de dos grados de libertad (Figura 1.28), en este caso
ha¡r 4 pares cle I GDL, de los cuales 3 son de rotación y uno de traslación.
repil :3(N l) 2P, P2:3(4-t) 2. 4-o: tr
sc trata de un mecanismo DESMODRÓVICO.
Figura 1.28. Posición de los pares de un grado de libertad.
CalcLrlar el número de grados de libertad de los siguientes mecanismos.
De nuevo, se aplica la fórmula de Grübler, y pueden verse en ta Figura 1.27.
En los tres casos los pares son de un grado de libertad.
(A) I cnl l:3(N - l) 2p, - p2:3(1-t) 2 . l0-0: tr,
Se tTata de una ESTRUCTURA HIPERESTÁTICA.
(B) repil:3(¡/ - r) 2p, - p2- 3(4-t) - 2. 4-0: [-1,
se trata cle un mecanismo DESMODRóH¡ICO.
(c) rept--] : 3(N t) - 2pt p:: 3(11-1) - 2 . t4-0 :A,
se trata de un mecanismo de DOS GRADOS DE LIBERTAD.](https://image.slidesharecdn.com/capitulo1-141118204822-conversion-gate01/85/Capitulo-1-me4canismo-32-320.jpg)















![Vibraciones unidad 1 b [sistema de resortes]](https://cdn.slidesharecdn.com/ss_thumbnails/vibracionesunidad1bautoguardado-160123184358-thumbnail.jpg?width=640&height=640&fit=bounds)



![Vibraciones unidad 1 c [autoguardado]](https://cdn.slidesharecdn.com/ss_thumbnails/vibracionesunidad1cautoguardado-160130180638-thumbnail.jpg?width=640&height=640&fit=bounds)






























