Descargado 35 veces




![VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
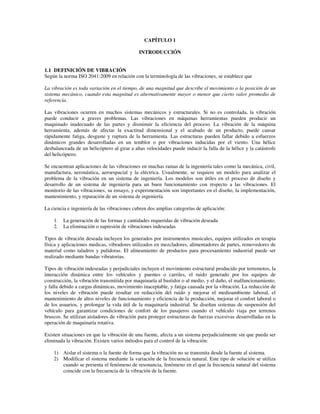
Figura 1.6 Vista lateral del modulo: 1) sensores de proximidad, 2) bases magnéticas, 3) actuador neumático,
4) driver del sensor de proximidad
1.6
a)
x [mm]
0 0,1 0,2 0,3
8,15
8,10
8,05
8,00
7,95
7,90
7,85
7.80
t [s]
y [mm]
10,45
10,40
10,35
10,30
10,25
10,20
0 0,1 0,2 0,3
t [s]
b)
7.80 7.85 7.90 7.95 8.00 8.05 8.10
10.50
10.45
10.40
10.35
10.30
10.25
10.20
Desplazamiento horizotal [mm]
Desplazamiento vertical [mm]
Figura 1.7 Señales obtenidas en el módulo de rodamiento: a) Señal de los sensores de proximidad, b) análisis
de órbita](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-6-320.jpg)


![FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Zona D
Zona C
Zona B
Zona A
f1
fx fy f2
1.9
f [Hz]
vrms
Figura 1.8 Forma general de niveles de vibración (norma ISO 10816 – 1995)
1.5 LA VIBRACIÓN EN ESTRUCTURAS Y EDIFICIOS
La incidencia de la vibración en las estructuras y edificios se trata en diferentes normas. Una de las más
empleadas y de prestigio es la norma DIN 4150 vibraciones estructurales. La parte 3 de esta norma, Efectos
de las vibraciones sobre la estructura tabla 1.2, da valores de referencia por sobre la cual se pueden producir
daños que tenga un efecto negativo en la utilización de la estructura.
Tabla 1.2 Valores de referencia de la velocidad de la vibración para ser utilizados cuando se evalúen los
efectos de las vibraciones de cierta duración sobre las estructuras (según DIN 4150)
Categoría
Tipo de estructura
Valores de referencia para la velocidad vi, en mm/s
Vibraciones en la cimentación a la frecuencia de 1)
1 Hz a 10 Hz 10 Hz a 50 Hz 50 Hz a 100 Hz
1
Edificios utilizado para uso
comercial, edificios industriales, y
edificios de diseño similar
20 20 a 40 40 a 50 40
2
Habitaciones y edificios de diseño
u ocupación similar
5 5 a 15 15 a 20 15
3
Estructuras que, a causa de la
misma sensibilidad particular a las
vibraciones, no puede ser
clasificado en las categorías 1 y 2
y que son de gran valor intrínsico
(por ejemplo edificios catalogados
en orden de preservación)
3 3 a 8 8 a 10 8
De 1 Hz a 10 Hz el valor de referencia es constante. De 10 Hz a 50 Hz y de 50 Hz a 100 Hz el valor de referencia
crece linealmente
A frecuencias superiores a 100 Hz, los valores de la última columna se pueden tomar como valores mínimos
1) Vibración en el plano horizontal del piso más alto a todas las frecuencias
Tabla 1.3 Valores de referencia de la velocidad de la vibración para ser utilizados cuando se evalúen los
efectos de las vibraciones de larga duración sobre las estructuras (según DIN 4150)
Categoría
Tipo de estructura
Valores de referencia para la velocidad vi, en
mm/s de vibración en el plano horizontal del
piso más alto a todas las frecuencias
1
Edificios utilizado para uso comercial, edificios
industriales, y edificios de diseño similar
10
2 Habitaciones y edificios de diseño u ocupación similar 5
3
Estructuras que, a causa de la misma sensibilidad particular
a las vibraciones, no puede ser clasificado en las categorías
1 y 2 y que son de gran valor intrínsico (por ejemplo
edificios catalogados en orden de preservación)
2,5](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-9-320.jpg)



![FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Una señal periódica, x(t), con periodo T y frecuencia f 1 = 1/T, (frecuencia fundamental) puede ser expresada
por una suma de senos y cosenos mediante las series de Fourier. El físico y matemático francés Jean Fourier
determinó que funciones no armónicas como las señales de vibración son la suma matemática de funciones
armónicas simples:
¥
= 0
+ ( p ) + ( p ) = ×
( ) cos 2 sin 2 ;
2 n n n n n
T T T
2 2 2
= = p × = p ×
( ) d ; cos 2 ( ) d ; sin 2 ( ) d ;
n n n n a x t t a f t x t t b f t x t t
T T T
1.13
1
1
n
a
x t a f t b f t f n f
=
Los coeficientes an y bn dependen de la señal periódica:
0 ( ) ( )
0 0 0
En la Figura 1.10 se muestra una función periódica. La Figura 1.11 presenta los coeficientes los coeficientes
an y bn de la serie de Fourier. La representación de las magnitudes an y bn en función de la frecuencia se
conoce como espectro de frecuencia. El espectro de frecuencia se presenta preferiblemente en magnitud y en
fase para las diferentes frecuencias. En la Figura 1.12 se presentan los resultados.
El análisis de la señales de vibración requiere interpretar la información compleja obtenida de una máquina.
En contradicción a las curvas simples teóricas de vibración, mostrada en la figura 1.5, el perfil de las
vibraciones de una máquina o componente es complejo. Esto se debe al hecho que generalmente existen
varias fuentes de vibración. La vibración producida de cada fuente se refleja en la señal obtenida siendo ésta
la resultante de cada uno de los perfiles generados. Esta señal de vibración se puede analizar en el tiempo o en
la frecuencia.
0
0,5
1
1,5
2
2,5
3
1,5
1,0
0,5
0,0
-0,5
-1,0
t [s]
x(t) [μm]
Figura 1.10 Señal en el tiempo
Figura 1.11 Componentes de la serie de Fourier](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-13-320.jpg)

![FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
0
0,05
0,1
0,15
0,2
0,25
0,3
1.15
15
10
5
0
-5
-10
-15
t [s]
v(t) [m/s]
Figura 1.13 Señal de la vibración de un ventilador a 1800 min-1
0 50 100 150 200 250 300 350 400 450 500
2,5
2,0
1,5
1,0
0,5
0
f [Hz]
v(t) [m/s] (rms)
1x
2x
3x
5x
Figura 1.14 Espectro de frecuencia de la vibración en el ventilador
El espectro de frecuencia, comúnmente se representa a frecuencias múltiples de la frecuencia de operación del
motor. Esta representación es más significativa que el valor de su frecuencia absoluta. El ventilador opera a
una velocidad de 1800 min-1, f = 30 Hz. Se observa del espectro de frecuencia, Figura 1.14, que las
componentes de mayor amplitud ocurren a frecuencias de 30, 60, 90 y 150 Hz. Estos valores se corresponden
con frecuencias a 1X, 2X, 3X, y 5X. Esta representación es de mayor utilidad para el análisis de la señal de
vibración.](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-15-320.jpg)
![VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
Ejemplo 1.1
En la Figura 1.15 se presenta un función periódica, con periodo T = 1s y amplitud de una unidad. Obtenga los
coeficientes de las series de Fourier para esta función.
0 1 1,5 2
= w ×
b n t x t t
w = = p rad/s. La solución de la integral es dada por:
0 / 2
2 2
T
= × w × + × w ×
-1 sin ( ) d 1 sin ( ) d
b n t x t t n t x t t
T T
2 cos cos
n w t n w t
2
= − = − p
b n
w w p
T n n n
x t t t t t
= p× + p× + p× + p× +
p
1.16
2
0
-2
0,5 t [s]
A
1
-1
-1 -0,5
Figura 1.15 Función periódica
Por tratarse de una función impar, los términos de la función coseno, an, son cero. Los términos de la función
seno, se obtienen mediante la siguiente expresión:
( )
/ 2
1
/ 2
2
sin ( ) d ;
T
n
T
T
−
donde T = 1s, f1 = 1 Hz, 1
2
2
p
T
( ) ( ) ( ) ( )
1 1
/ 2 0
n
T
−
( )
0 / 2
1 1
1 / 2 1 0
1 cos
T
n
T
−
Finalmente se tiene:
0 , n
es par
4
b
n , n
es impar
n
=](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-16-320.jpg)

![FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
0 5 10 15 20
1.17
A
1,4
1,2
1,0
0,8
0,6
0,4
0,2
0
f [Hz]
Figura 1.16 Espectro de frecuencia
En la Figura 1.17 se representa la suma de las componentes en el espacio tiempo frecuencia. La función
resultante es la suma de cada una de estas componentes.
0
2
4
6
8
10
1,5
0
-1,5
2
1
0
f [Hz]
A
t [s]
1
3
5
7
9
Figura 1.17 Diagrama Amplitud vs tiempo – frecuencia
En la Figura 1.18 se representa la forma de la función cuando se considera diferente número de componentes
de la función sinusoidal. Se observa que al tomar muchos componentes prácticamente se genera la misma
señal. En la Figura 1.18 n representa el número de términos de la función seno. Es importante recordar que en
esta serie solo se toman múltiplos impares de la frecuencia fundamental.](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-18-320.jpg)
![VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
A A
1.18
0 1 1,5 2
2
0
-2
n =1
2
0
-2
n =2
0,5 t [s]
0,5 t [s] 0 1 1,5 2
0 1 1,5 2
2
0
-2
n = 3
2
0
-2
n = 4
0,5 t [s] 0 1 1,5 2
0,5 t [s]
A A
0 1 1,5 2
2
0
-2
n = 5
2
0
-2
n = 6
0,5 t [s] 0 1 1,5 2
0,5 t [s]
A A
0 1 1,5 2
2
0
-2
n = 7
2
0
-2
n =100
0,5 t [s] 0 1 1,5 2
0,5 t [s]
A A
Figura 1.18 Señal obtenida por la suma de las funciones armónicas
Ejemplo 1.2
En una medición experimental del par de un motor en función del tiempo, se obtuvo la curva presenta en la
Figura 1.19, estos valores son mostrados en la tabla 1.5; estos datos experimentales se obtuvieron con el
motor operando a n = 3000 min-1. Realice un análisis armónico de la variación del par y determine los
primeros armónicos de la series de Fourier.
0
600
500
400
300
200
100
0
t [ms]
M [N m]
5 10
Figura 1.19 Diagrama del par de un motor](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-19-320.jpg)
![FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Tabla 1.5 Mediciones experimentales del par en un ciclo
t [ms] 0 0,278 0,556 0,833 1,111 1,389 1,667
M [N m] 160 250 390 470 530 560 540
t [ms] 1,944 2,222 2,5 2,778 3,056 3,333 3,611
M [N m] 480 440 400 340 300 260 220
t [ms] 3,889 4,167 4,44 4,722 5
M [N m] 170 120 100 90 160
En las señales obtenidas del motor se presenta una repetición del par motor cada 5 ms, con lo que se obtiene
una frecuencia f =1 /0,005 ms = 200 Hz, y una frecuencia angular w = 2 p / 0,005 = 1256,6 rad/s. Los
coeficientes se obtienen mediante:
19
= = =
a M M
N = =
2 2
= cos 2 p = cos 2
p
a M n f t M n f t
n i i i i
N = =
2 2
= sin 2 p = sin 2
p
b M n f t M n f t
n i i i i
N = =
M t t t t t
= − p + p − p + p
+ p + p + p + p
1.19
0
2 2
1 1
629,474Nm
19
N
i i
i i
19
( ) ( )
1 1
19
N
1 1
i i
19
( ) ( )
1 1
19
N
1 1
i i
En la tabla 1.6 se presenta el cálculo de los tres primeros coeficientes an y bn. Sólo se presentan estos valores
por motivos de espacio. Es importante recordar que la frecuencia fundamental es f = 200 Hz.
i t [ms] Mi n = 1 n = 2 n = 3
Mi cos(2pf ti) Mi sin(2pf ti) Mi cos(4pf ti) Mi sin(4pf ti) Mi cos(6pf ti) Mi sin(6pf ti)
1 0,00 160 160,00 0,00 160,00 0,00 160,00 0,00
2 0,28 250 234,92 85,51 191,51 160,70 125,00 216,51
3 0,56 390 298,76 250,69 67,72 384,08 -195,00 337,75
4 0,83 470 235,00 407,03 -235,00 407,03 -470,00 0,00
5 1,11 530 92,03 521,95 -498,04 181,27 -265,00 -458,99
6 1,39 560 -97,24 551,49 -526,23 -191,53 280,00 -484,97
7 1,67 540 -270,00 467,65 -270,00 -467,65 540,00 0,00
8 1,94 480 -367,70 308,54 83,35 -472,71 240,00 415,69
9 2,22 440 -413,46 150,49 337,06 -282,83 -220,00 381,05
10 2,50 400 -400,00 0,00 400,00 0,00 -400,00 0,00
11 2,78 340 -319,50 -116,29 260,46 218,55 -170,00 -294,45
12 3,06 300 -229,81 -192,84 52,09 295,44 150,00 -259,81
13 3,33 260 -130,00 -225,17 -130,00 225,17 260,00 0,00
14 3,61 220 -38,20 -216,66 -206,73 75,24 110,00 190,53
15 3,89 170 29,52 -167,42 -159,75 -58,14 -85,00 147,22
16 4,17 120 60,00 -103,92 -60,00 -103,92 -120,00 0,00
17 4,44 100 76,60 -64,28 17,36 -98,48 -50,00 -86,60
18 4,72 90 84,57 -30,78 68,94 -57,85 45,00 -77,94
19 5,00 160 160,00 0,00 160,00 0,00 160,00 0,00
5980 -834,5 1626 -287,2 214,36 95 25,981
2
19 ×() 629,47 -87,84 171,16 -30,24 22,564 10 2,735
La función de aproximación de los datos experimentales es dado por:
( ) 314,735 87,84cos(400 ) 171,16sin(400 ) 30,24cos(800 ) 22,564sin(800 )
10cos(1200 t ) 2,375sin(1200 t ) 16,82cos(1600 t ) 2,45sin(1600 t
)
En la Figura 1.20 se presenta la función de aproximación con diferente número de términos. Para obtener el
espectro de frecuencia, se requiere calcular los coeficientes Cn obtenido mediante la raíz cuadrada de la suma
de los cuadrados de los coeficientes An y Bn; en la Figura 1.21 se presenta el espectro de frecuencia.](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-20-320.jpg)
![VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
n = 1 n = 2
600
500
400
300
200
100
600
500
400
300
200
100
=
x t X f e
1.20
0 1 2 3 4 5
600
500
400
300
200
100
0
0 1 2 3 4 5
0
0 1 2 3 4 5
600
500
400
300
200
100
0
0 1 2 3 4 5
0
t [ms]
t [ms]
t [ms]
t [ms]
M [Nm] M [Nm]
M [Nm] M [Nm]
n = 3 n = 4
Figura 1.20 Aproximación de los datos experimentales del motor
0 200 400 600 800 1000 1200
350
300
250
200
150
100
50
0
f [Hz]
M [N m]
Figura 1.21 Espectro de frecuencia de los datos experimentales
En un proceso real se tendría la captura de valores con una frecuencia alta y un número de datos elevados.
Generalmente se tienen datos en los que se tendrían varios periodos de la señal. En la mayoría de los
procesos, no es sencillo identificar un periodo, por lo que se toma como frecuencia, la frecuencia de muestreo
de captura de datos, dividido por la mitad del número de datos.
La serie de Fourier puede ser representado en términos de números complejos. Una función exponencial
puede ser representado mediante:
j t cos jsin ; j t cos jsin e t t e t t w w w w w w − = + = −
Una función periódica puede ser representado mediante
( )
2
j
( )
¥ p
=−¥
k t
T
k
k
− p =
donde ( ) j2
0
1
( ) k d
T
f t
k X f x t e t
T
Cuando el periodo tiende a ser infinito, lo que ocurre en funciones aperiódicas, el componente a una
frecuencia fk es dado por:](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-21-320.jpg)


![FACULTAD DE INGENIERÍA MECÁNICA – UNIVERSIDAD TECNOLÓGICA DE PEREIRA
Para señales discretas, vector x de dimensión N, se define mediante
=
x x N
1.23
2
1
N
rms n
n
=
Ejemplo 1.4
Determine el valor eficaz de una función dado por:
x (t ) = 2 + 3sin (4pt + 0,5) + 20sin (16,6508pt −1,8) + 6sin (2 37pt + 2) +12.3sin (2 135,87pt − 0,1)
Se tiene una función resultante de funciones armónicas en la que los periodos no son múltiplos. Se observa en
la Figura 1.23 el comportamiento cuasi periódico de la función. Por este motivo se procede a calcular el valor
rms en su versión discreta.
0 1 2 3 4 5 6
x(t)
50
40
30
20
10
0
-10
-20
-30
-40
-50
t [s]
Figura 1.23 Señal en el tiempo de la función del ejemplo 1.4
A continuación se presenta el listado de comandos en Matlab para el cálculo del valor eficaz a partir de un
conjunto de datos discreto. Este tipo de señales es el que se obtendría al capturar la señal con un sensor.
f1=2;f2=4;f3=6;
A1=3;A2=20;A3=6;A0=2;
phi1=0.5;phi2=-1.8;phi3=2;
vt=0:0.001:30; %Vector tiempo con un periodo de muestreo de 1 ms, fmuestreo = 1 kHz
vx=A0+A1*sin(2*pi*f1*vt+phi1)+A2*sin(2*pi*f2*vt+phi2)+A3*sin(2*pi*f3*vt+phi3);
suma=0;
tam=length(vt);
for jk=1:tam
suma=suma+vx(jk)^2;
end](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-24-320.jpg)
![VIBRACIONES MECÁNICAS – CAPÍTULO 1. INTRODUCCIÓN
= = =
1.24
valor=sqrt(suma/tam)
R: xrms = 15,0458
Una segunda alternativa consiste en calcular el valor rms a partir de las amplitudes de las funciones armónicas
que componen la señal:
2 2 2 2
2
rms
2 2 2 3 20 6
+ + +
/ 14,9833
2 2 4 i x A N
Esta evaluación es posible ya que los fasores son independientes.
Para la representación de los niveles de vibración es común utilizar escalas lineales y logarítmicas. El interés
en utilizar escalas logarítmicas es en general, valorar los cambios en los niveles de vibración por el
incremento relativo con respecto a los niveles normales de operación.
La escala logarítmica se define en decibeles para comparar los niveles de vibración. El decibel de un nivel x1
con respecto a un nivel de referencia x0 se determina mediante:
[ ] 1
0
db 20log
x
N
x
=
1.11 EJERCICIOS
1.1 En un ventilador centrifugo, el aire impulsado en la tubería, tiene un comportamiento de una función
impulso correspondiéndose a la descarga del paso del alabe en la región de descarga, tal como se muestra
en la figura 1. La frecuencia de estos impulsos es determinado por la velocidad de rotación del eje del
ventilador, n, y del número de alabes, N. Considerando que el ventilador gira a n = 100 min-1, y tiene
cuatro alabes, determina los primeros cuatro armónicos para la fluctuación de la presión en la tubería.
pmáx = 600 kPa
0 T/4 T 5T/4 2T 9T/4 3T 9T/4 t [s]
Figura P.1.1
1.2 Realice el análisis armónico, incluyendo los tres primeros armónicos de la función dada a continuación
Tabla P 1.2
ti 0,0 0,02 0,04 0,06 0,08 0,10 0,12 0,14
xi 0 5 -8 -8 -6 -8 -6 6
ti 0,16 0,18 0,20 0,22 0,24 0,26 0,28 0,30
xi 17 14 8 3 -10 -14 -10 0
1.3 Determine la ecuación de desplazamiento s(t) del pistón del mecanismo biela manivela. Considere que la
manivela gira con velocidad angular constante a 6 rad/s. Determine las componentes armónicas y
represente el espectro de frecuencia para la amplitud y la fase. Considere r = 30 mm, L = 75 mm.
Compare la función que se obtiene utilizando 2, 3, 4 y 5 armónicos con la función de desplazamiento.](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-25-320.jpg)

![1.25
q
r
r+L
s
Figura P 1.3
1.4 La fuerza de impacto creado por una máquina forjadora puede ser modelada tal como se muestra en la
figura. Determine la expansión en series de Fourier de la fuerza de impacto.
0 2 4 6 8 10
600
500
400
300
200
100
0
1 3 t [s]
F [N]
Figura P 1.4
La fuerza puede ser representada, aproximadamente, mediante la función:
( )
3 478,92 213,86 2 60,344 3 9,805 4 0,815 5 0,0272 6 , 0 1
0 ,1 4
F t
t
1.5 En la figura P 1.5 se representa el mecanismo de la limadora y el par motor requerido en la manivela para
su accionamiento. Determine los cinco primeros armónicos para el par motor. En la tabla P.1.4 se
presentan los valores del par en función del tiempo. Reconstruya la figura con los armónicos obtenidos,
represente el espectro de frecuencia.](https://image.slidesharecdn.com/captulo1-141030113136-conversion-gate02/85/Capitulo-1-27-320.jpg)

Este documento introduce el concepto de vibración mecánica y describe varios métodos para analizar y controlar las vibraciones. Explica que la vibración es un movimiento oscilatorio alrededor de una posición de equilibrio y puede causar daños si no se controla. Luego describe técnicas como el análisis en el dominio del tiempo, el análisis espectral de Fourier, y el análisis de órbita para diagnosticar problemas y sus causas. Finalmente, resume varios métodos para controlar vibraciones indeseadas como el aislam






















































































