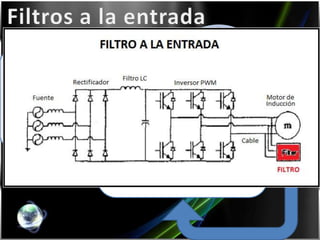
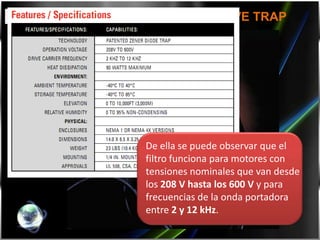
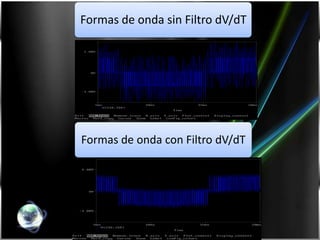
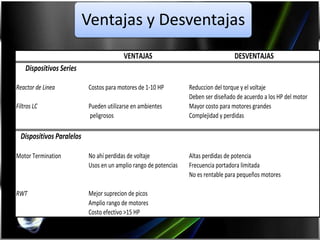
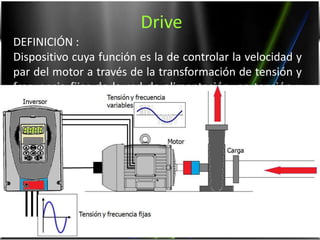
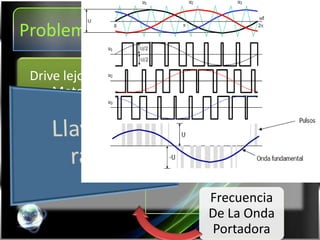
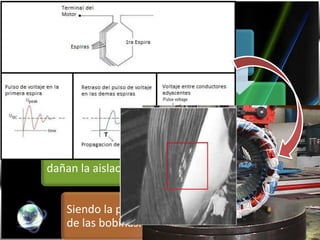
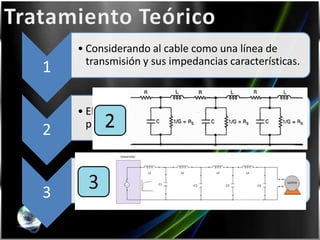
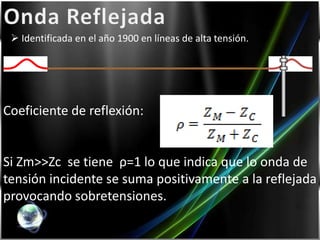
El documento describe diferentes tipos de filtros que se pueden usar para reducir sobretensiones entre un variador de frecuencia (drive) y un motor eléctrico. Explica que las sobretensiones se producen debido a la reflexión de ondas en la línea de transmisión entre el drive y el motor. Luego detalla filtros en serie como reactores y filtros LC, y filtros en paralelo como terminación del motor y trampas de onda reflejada. Finalmente, compara ventajas y desventajas de cada solución.



![PARA MOTORES HASTA 460V INCLUSIVE (MOTORES WEG),
NO SE REQUIERE DEL USO DE FILTROS BAJO LAS
SIGUIENTES CONDICIONES:
₪ Rise time del inversor: tr ≥ 0,1 ms
₪ Máxima tensión pico: VPICO ≤ 3,1 VNOM
₪ Mínimo tiempo entre pulsos consecutivos: tmtep ≥ 6 ms*
₪ Máxima frecuencia de conmutación: 5kHz
₪ Máxima dv/dt (a la salida del inversor): dV/dt ≤ 5200 [V/µs]](https://image.slidesharecdn.com/drives-13457404731774-phpapp02-120823115200-phpapp02/85/Drives-Motor-8-320.jpg)