Descargado 532 veces
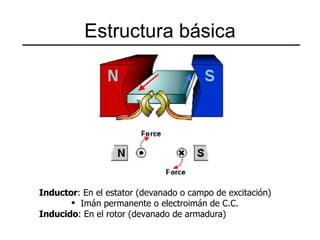
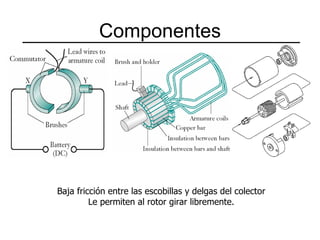
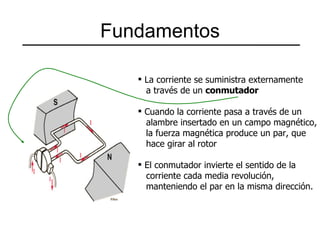
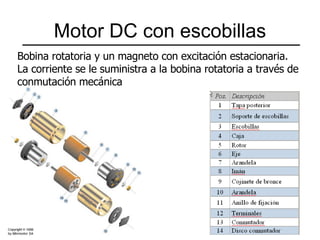
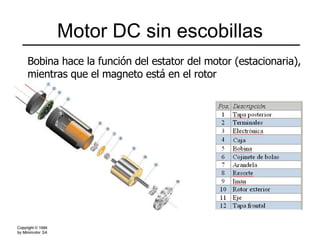
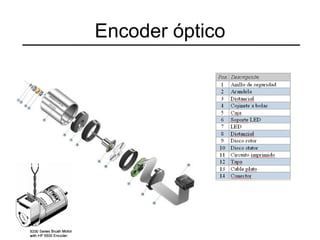
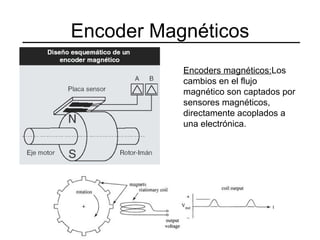
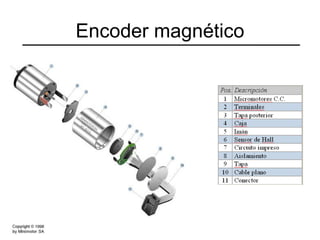
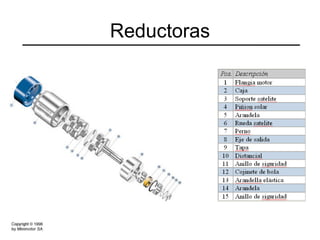
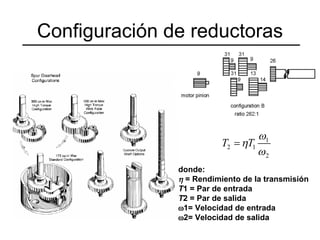
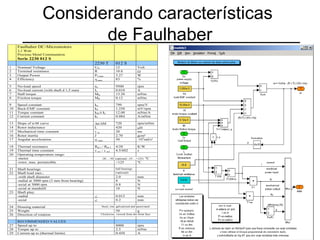
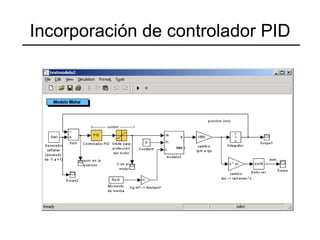
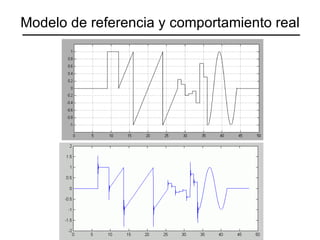
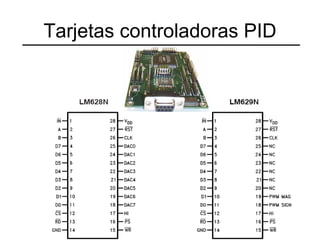
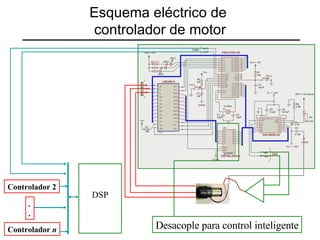
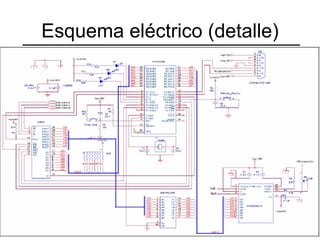

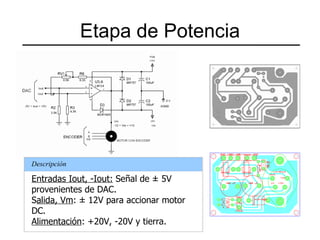
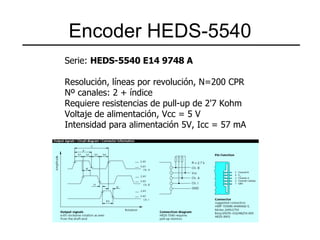
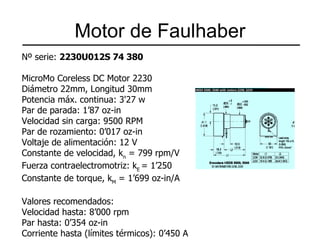

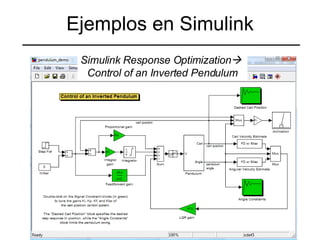
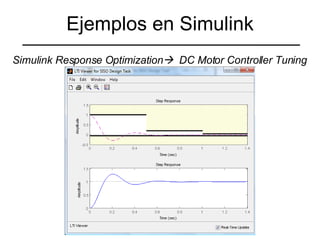
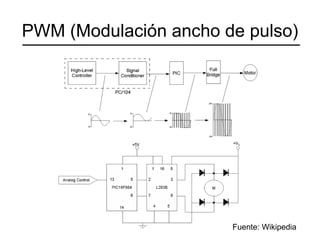
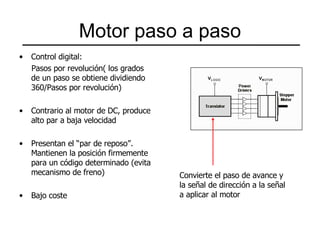

El documento describe diferentes tipos de motores y componentes utilizados en robótica, incluyendo motores de corriente continua con y sin escobillas, encoders ópticos y magnéticos, reductores y su configuración, y conceptos como par, velocidad y potencia. También presenta modelos de motores DC, circuitos de control, y consideraciones para la selección e implementación de motores en aplicaciones robóticas.























![Perancangan instalasi-listrik [read-only] [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/perancangan-instalasi-listrikread-onlycompatibilitymode-160906041101-thumbnail.jpg?width=640&height=640&fit=bounds)


































































![Pasco[F][F][F][F][F][F][F][F][F] (3)[R] (1) (1).docx](https://cdn.slidesharecdn.com/ss_thumbnails/pascofffffffff3r11-260122185917-5ef4a718-thumbnail.jpg?width=640&height=640&fit=bounds)



