Descargado 247 veces



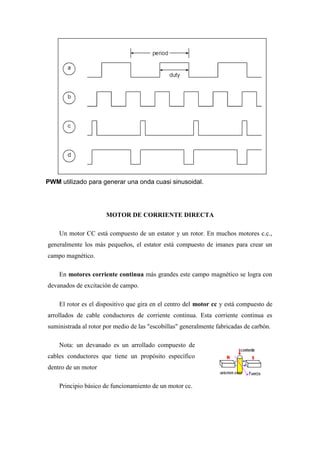



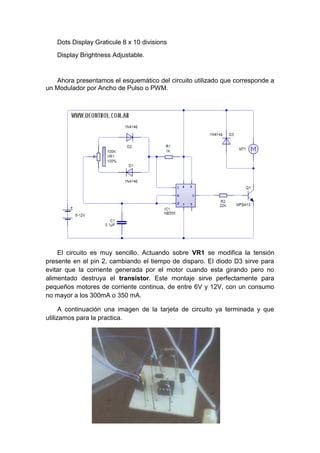







El documento describe una práctica realizada por estudiantes de ingeniería electrónica para simular el control de la velocidad de un motor de corriente directa mediante modulación por ancho de pulsos (PWM) usando un circuito basado en el NE555. Los estudiantes construyeron el circuito, lo simularon, y probaron su funcionamiento variando la velocidad del motor al ajustar el ciclo de trabajo de la señal PWM. Concluyeron que el control PWM permite manipular la velocidad del motor variando la duración del ciclo de































































