Descargado 876 veces
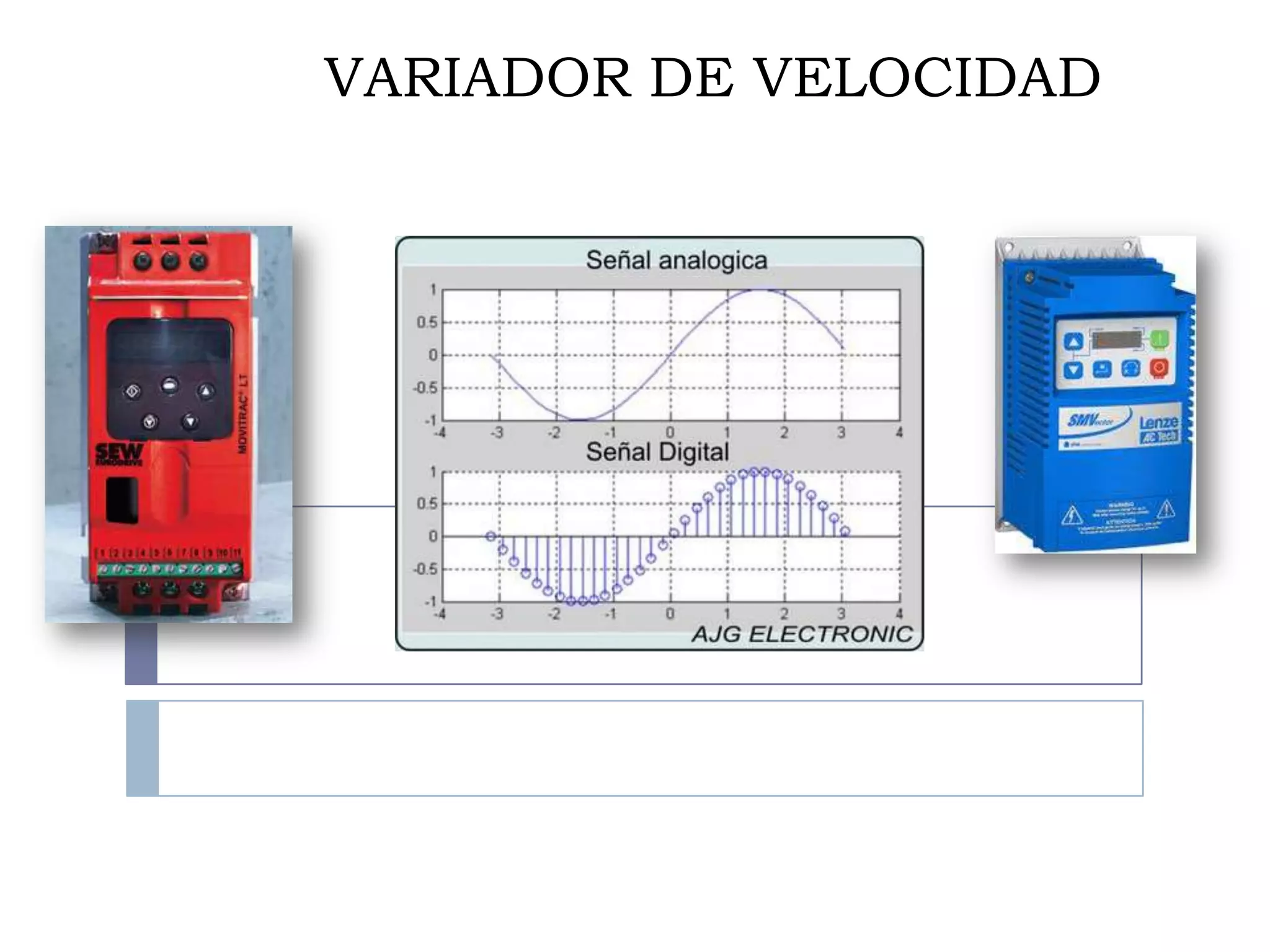
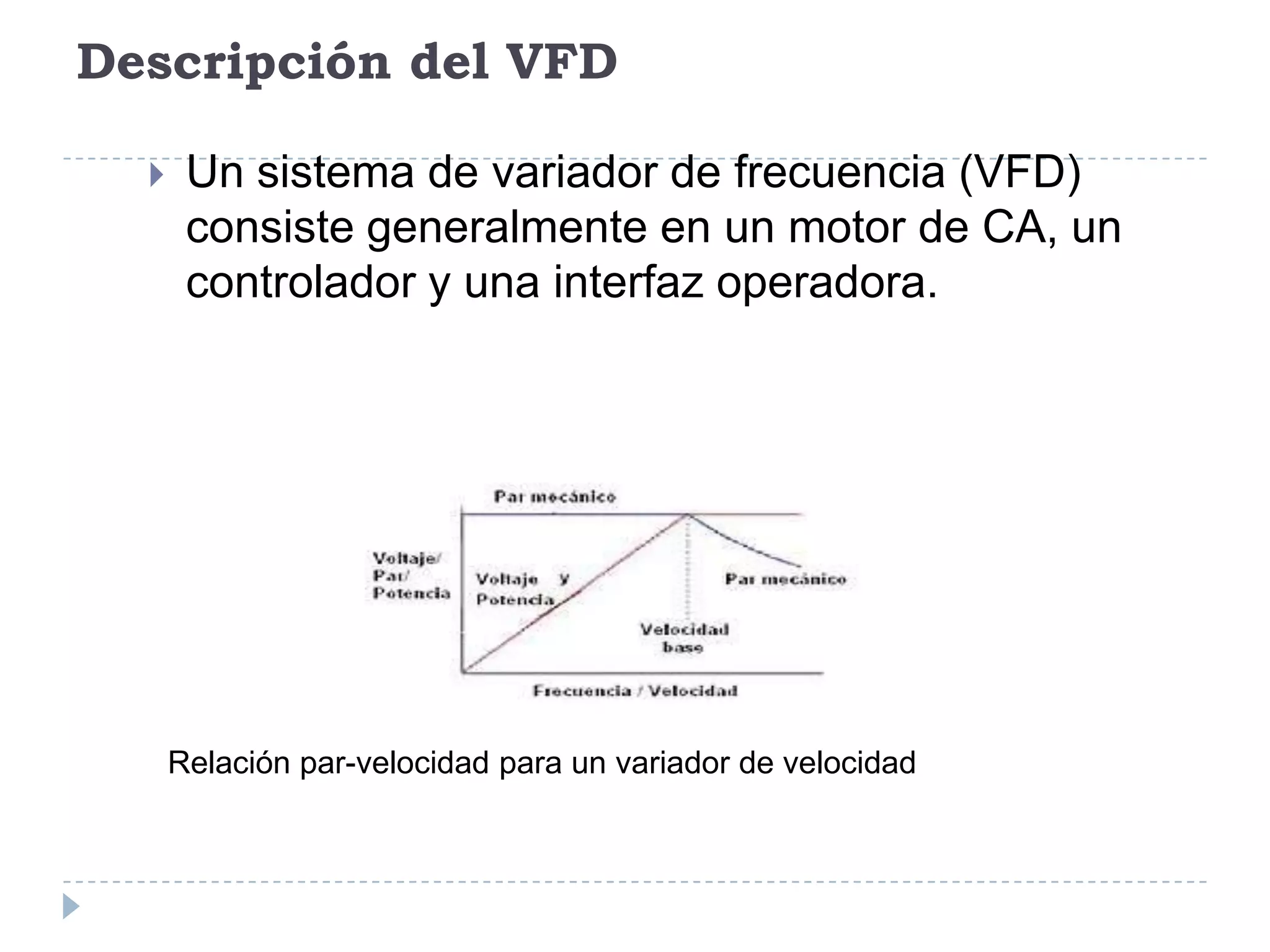



Un variador de frecuencia controla la velocidad de un motor de corriente alterna variando la frecuencia de alimentación suministrada al motor. Funciona variando la frecuencia y el voltaje de forma proporcional para mantener una relación constante. Se usa principalmente para controlar la velocidad de bombas, ventiladores, transportadoras y máquinas industriales para ahorrar energía y mejorar el proceso.


































































