REDES DE CONTROL
PLCy Redes Industriales
Grupo Nº 3: Klever Imues
Cinthya Jiménez
César Largo
Leonardo Mejía
Jesús Mendoza
Tayron Mora
Universidad de las Fuerzas Armadas-ESPE
2.
Introducción
1
• Consiste encontroladores industriales
como PLC’S, Unidades de control
distribuido y sistemas informáticos.
2
• Se encarga de la configuración de
dispositivos de automatización, carga de
datos del programa, supervisión ,etc.
3
• Requiere de una red con tiempo de
respuesta corto y transmisión a alta
velocidad.
3.
Introducción
4 • Inmunidadal ruido
elevada
5
• Fiabilidad y
Seguridad
6
• Reducción significativa
en el cableado y la
intercambiabilidad de
los módulos de función
4.
DCS: Sistema deControl Distribuido
Un sistema de control distribuido (DCS) es un sistema de control
automatizado especialmente diseñado que consta de elementos de
control distribuidos geográficamente sobre la planta o el área de control.
Diferentes nodos repartidos
físicamente en todo el proceso
industrial se interconectan entre sí,
permitiendo la comunicación
entre ellos de forma ordenada, a
través de buses de comunicación
o redes multiplexadas, cada nodo
puede realizar su propio
procesamiento gracias a que
están dotados de procesamiento,
es decir, poseen su propio
hardware (CPU, memoria,
oscilador de reloj, interfaz de
comunicaciones, interfaz hacia el
subsistema que controla).
5.
Arquitectura del Sistemade Control Distribuido
Distribución de varias funciones de control en conjuntos
relativamente pequeños de subsistemas, que son
semiautónomos y están interconectados a través de un bus de
comunicación de alta velocidad.
Automatización del proceso de fabricación
mediante la integración de estrategias de control
avanzadas.
Organización de las cosas como un sistema
DCS: Sistema deComunicación
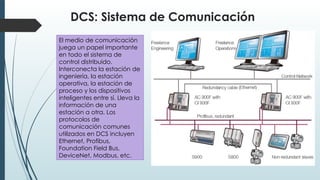
El medio de comunicación
juega un papel importante
en todo el sistema de
control distribuido.
Interconecta la estación de
ingeniería, la estación
operativa, la estación de
proceso y los dispositivos
inteligentes entre sí. Lleva la
información de una
estación a otra. Los
protocolos de
comunicación comunes
utilizados en DCS incluyen
Ethernet, Profibus,
Foundation Field Bus,
DeviceNet, Modbus, etc.
8.
DCS: Ventajas ycaracterísticas
• Operan con los datos guardados en un mismo lugar donde
se encuentran el conjunto de señales, variables, objetos
gráficos, alarmas y eventos involucrados en el sistema
• Varios usuarios pueden programar de forma simultánea
sobre el sistema de forma segura sin ningún tipo de conflicto
de versiones.
• El software y hardware, ambos, son elementos que
constituyen el DCS, debido a que son fáciles de instalar,
dichos gastos, son relativamente bajos.
• La detención de uno de los subprocesos no afecta al
desarrollo del otro, es decir, cada subproceso opera de
manera separada con su propia unidad de procesamiento,
permitiendo esto, continuar con una parte del proceso
mientras la otra está siendo diagnosticada en el proceso de
detección de averías.
INTRODUCCIÓN
En el contextode la Totally Integrated Automation (TIA),
PROFINET es la evolución lógica del bus de campo
Profibus DP y de Industrial Ethernet.
• PROFINET, como estándar de automatización, está
basado en Ethernet.
• Profibus International (Profibus User Organisation)
define así un modelo abierto de comunicación e
ingeniería.
11.
PROFINET: Objetivos
• Serun estándar abierto para la automatización
basado en Industrial Ethernet.
• Que los componentes de Industrial Ethernet y Standard
Ethernet puedan utilizarse conjuntamente, aunque los
equipos de Industrial Ethernet sean más robustos y, por
consiguiente, más apropiados para el entorno
industrial (temperatura, seguridad de funcionamiento,
etc.).
• Usar estándares TCP/IP y de tecnologías de la
información.
• Automatización con Ethernet en tiempo real.
• Integrar de forma directa sistemas con bus de campo.
12.
PROFINET: Ventajas
• Flexibilidadgracias al empleo de Ethernet y de los
acreditados estándares IT.
• Ahorro de ingeniería y puesta en marcha gracias a la
modularización.
• Protección de la inversión para equipos y aplicaciones
Profibus.
• Más rápido que los actuales buses especiales en el
ámbito de Motion Control.
• Amplio abanico de productos disponibles en el
mercado
13.
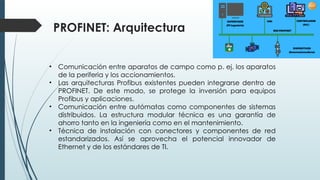
PROFINET: Arquitectura
• Comunicaciónentre aparatos de campo como p. ej. los aparatos
de la periferia y los accionamientos.
• Las arquitecturas Profibus existentes pueden integrarse dentro de
PROFINET. De este modo, se protege la inversión para equipos
Profibus y aplicaciones.
• Comunicación entre autómatas como componentes de sistemas
distribuidos. La estructura modular técnica es una garantía de
ahorro tanto en la ingeniería como en el mantenimiento.
• Técnica de instalación con conectores y componentes de red
estandarizados. Así se aprovecha el potencial innovador de
Ethernet y de los estándares de TI.
14.
Tipos de PROFINET
•PROFINET IO define un modelo abierto de
comunicación, automatización e ingeniería
• PROFINET IO se basa en Switched Ethernet con modo
dúplex y un ancho de banda de 100 Mbits/s.
• En el contexto de PROFINET, PROFINET IO es un
concepto de comunicación para la realización de
aplicaciones modulares descentralizadas.
PROFINET IO
15.
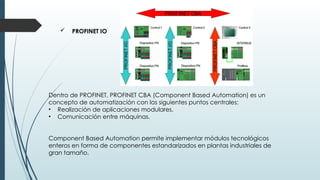
PROFINET IO
Dentrode PROFINET, PROFINET CBA (Component Based Automation) es un
concepto de automatización con los siguientes puntos centrales:
• Realización de aplicaciones modulares.
• Comunicación entre máquinas.
Component Based Automation permite implementar módulos tecnológicos
enteros en forma de componentes estandarizados en plantas industriales de
gran tamaño.
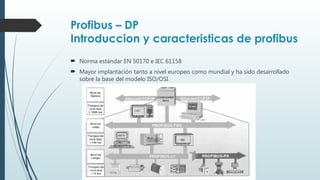
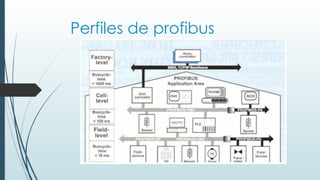
Profibus – DP
Introducciony caracteristicas de profibus
Norma estándar EN 50170 e IEC 61158
Mayor implantación tanto a nivel europeo como mundial y ha sido desarrollado
sobre la base del modelo ISO/OSI
18.
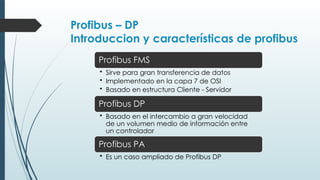
Profibus – DP
Introducciony características de profibus
Profibus FMS
• Sirve para gran transferencia de datos
• Implementado en la capa 7 de OSI
• Basado en estructura Cliente - Servidor
Profibus DP
• Basado en el intercambio a gran velocidad
de un volumen medio de información entre
un controlador
Profibus PA
• Es un caso ampliado de Profibus DP
19.
Profibus DP
Noes el perfil más adecuado para trabajar a nivel de campo
No sólo basta con que llegue rápido sino que llegue en un tiempo máximo y
conocido por el sistema
Otros criterios de elección de un bus de comunicaciones que son importantes:
Capacidad de ser diagnosticado ante algún error producido en la red o en algún
dispositivo.
Inmunidad a las posibles interferencias que se puedan producir en su entorno
Facilidad tanto en su configuración como en el manejo y construcción.
20.
Profibus DP
Elmétodo utilizado para el control de acceso a la red es el conocido como maestro
esclavo
Cabe distinguir dos categorías distintas de maestros y una de esclavo, como son:
D PM I: Maestro DP de clase 1. Tiene asignadas las funciones de control sobre sus
esclavos conectados en su red. Normalmente son autómatas programables u
ordenadores.
DPM2: Maestro DP de clase 2. Son estaciones cuyas funciones son las de configuración y
diagnóstico. Normalmente son terminales de operador o unidades específicas de
programación y configuración.
Esclavo DP: Es una unidad de periferia que realiza la lectura de las entradas, normalmente
dispositivos de mando y de detección, y envía información a las salidas que a él se
encuentran conectadas, normalmente dispositivos de accionamiento.
21.
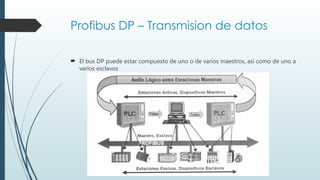
Profibus DP –Transmision de datos
El bus DP puede estar compuesto de uno o de varios maestros, así como de uno a
varios esclavos
22.
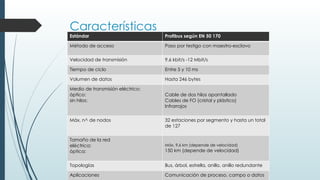
Características
Estándar Profibus segúnEN 50 170
Método de acceso Paso por testigo con maestro-esclavo
Velocidad de transmisión 9,6 kbit/s -12 Mbit/s
Tiempo de ciclo Entre 5 y 10 ms
Volumen de datos Hasta 246 bytes
Medio de transmisión eléctrico:
óptico:
sin hilos:
Cable de dos hilos apantallado
Cables de FO (cristal y plástico)
Infrarrojos
Máx. n^ de nodos 32 estaciones por segmento y hasta un total
de 127
Tamaño de la red
eléctrica:
óptica:
Máx. 9,6 km (depende de velocidad)
150 km (depende de velocidad)
Topologías Bus, árbol, estrella, anillo, anillo redundante
Aplicaciones Comunicación de proceso, campo o datos
23.
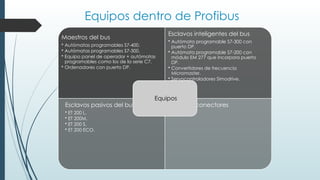
Equipos dentro deProfibus
Maestros del bus
• Autómatas programables S7-400.
• Autómatas programables S7-300.
• Equipo panel de operador + autómatas
programables como los de la serie C7.
• Ordenadores con puerto DP.
Esclavos inteligentes del bus
• Autómata programable S7-300 con
puerto DP.
• Autómata programable S7-200 con
módulo EM 277 que incorpora puerto
DP.
• Convertidores de frecuencia
Micromaster.
• Servocontroladores Simodrive.
Esclavos pasivos del bus
• ET 200 L.
• ET 200M.
• ET 200 S.
• ET 200 ECO.
Cables y conectores
Equipos
24.
PROFIBUS - FMS
Esel perfil de comunicación capaz de manejar todas las tareas intensivas de
transferencia de datos muy comunes en las comunicaciones industriales, por
lo que se le considera la solución universal para la transferencia de
información en el nivel superior y de campo del modelo jerárquico de
automatización. Es la solución general para tareas de comunicación a nivel
de control. Los potentes servicios FMS abren un amplio rango de aplicaciones
y proveen de gran flexibilidad. También puede ser empleado para tareas de
comunicación extensas y complejas. Está concebido para comunicar
elementos de campo complejos que dispongan de interface FMS. Se pueden
alcanzar velocidades de transmisión de hasta 1,5 Mb/sg. en función del
medio utilizado. Sistema multimaestro.
Cables y conectores para Profibus
Profibus sólo satisface tres capas del modelo OSI, Física (1), Enlace de datos
(2) y Aplicación (7), como casi todos los buses de campo.
25.
PROFIBUS - FMS
Elprotocolo FMS usa las capas 1, 2 y 7. La capa 1 del modelo corresponde a
la capa física y es donde se establece el medio físico para diferentes técnicas
de transmisión. En la capa física también se provee transmisión con seguridad
intrínseca y la alimentación eléctrica a las estaciones de la red. Los medios
más comunes son el hilo de cobre trenzado y la fibra óptica. RS-485 es la
tecnología de transmisión más utilizada por Profibus. Ésta se aplica en todas
las áreas en donde se requiere una alta velocidad de transmisión.
La capa 2 es la de enlace de datos, donde se define cuando una estación
puede transmitir o recibir datos según se ha descrito anteriormente.
La capa 7, sólo se utiliza en FMS, es la de aplicación, y se encarga de proveer
los servicios de comunicaciones que pueden ser utilizados por el usuario.
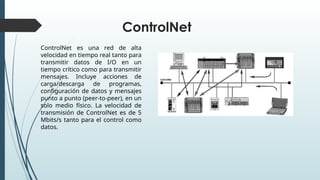
ControlNet
ControlNet es unared de alta
velocidad en tiempo real tanto para
transmitir datos de I/O en un
tiempo crítico como para transmitir
mensajes. Incluye acciones de
carga/descarga de programas,
configuración de datos y mensajes
punto a punto (peer-to-peer), en un
solo medio físico. La velocidad de
transmisión de ControlNet es de 5
Mbits/s tanto para el control como
datos.
29.
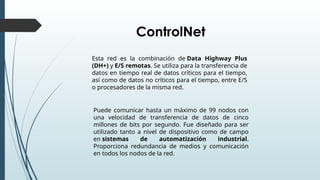
Esta red esla combinación de Data Highway Plus
(DH+) y E/S remotas. Se utiliza para la transferencia de
datos en tiempo real de datos críticos para el tiempo,
así como de datos no críticos para el tiempo, entre E/S
o procesadores de la misma red.
Puede comunicar hasta un máximo de 99 nodos con
una velocidad de transferencia de datos de cinco
millones de bits por segundo. Fue diseñado para ser
utilizado tanto a nivel de dispositivo como de campo
en sistemas de automatización industrial.
Proporciona redundancia de medios y comunicación
en todos los nodos de la red.
ControlNet
30.
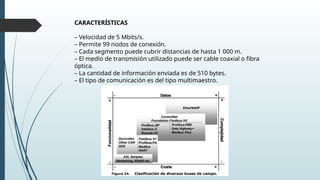
CARACTERÍSTICAS
– Velocidad de5 Mbits/s.
– Permite 99 nodos de conexión.
– Cada segmento puede cubrir distancias de hasta 1 000 m.
– El medio de transmisión utilizado puede ser cable coaxial o fibra
óptica.
– La cantidad de información enviada es de 510 bytes.
– El tipo de comunicación es del tipo multimaestro.
Bibliografía
• Sistemas Industrialesdistribuidos. Recuperado de:
https://www.uv.es/rosado/courses/sid/Capitulo3_rev0.pdf
• Martínez, L. (2009).Comunicaciones Industriales. Recuperado de:
https://books.google.com.ec/books/about/Comunicaciones_Industriales
_Siemens.html?id=fPCVCoDCa8IC&redir_esc=y
• Redes de comunicación. Recuperado de:
https://www.sicma21.com/que-son-las-redes-de-comunicacion-industrial/
• Redes de control. Recuperado de:
https://es.slideshare.net/MauriciTo1/redes-de-controlyredesdedatos



















![Tarea bus de_campo[1]](https://cdn.slidesharecdn.com/ss_thumbnails/tareabusdecampo1-101021131006-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)























