Descargado 279 veces





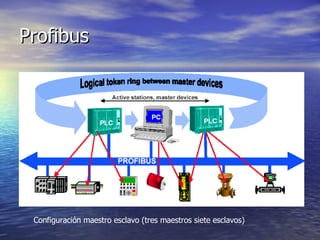
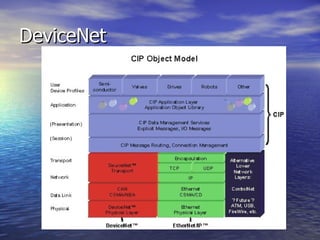



Este documento resume varias redes industriales comúnmente utilizadas en plantas industriales, incluyendo Ethernet industrial, Profibus, DeviceNet y CAN bus. Explica las características, aplicaciones y ventajas de cada una. También menciona otras tecnologías industriales y concluye que no existe un estándar dominante debido a que diferentes redes se adaptan mejor a diferentes aplicaciones industriales.

















































![Tarea bus de_campo[1]](https://cdn.slidesharecdn.com/ss_thumbnails/tareabusdecampo1-101021131006-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
















