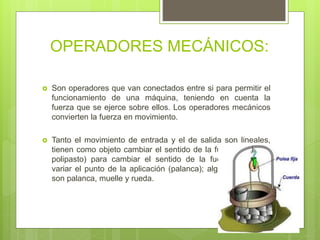
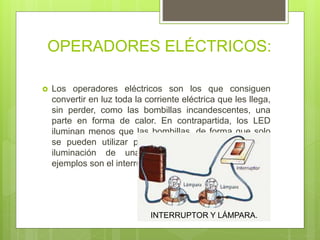
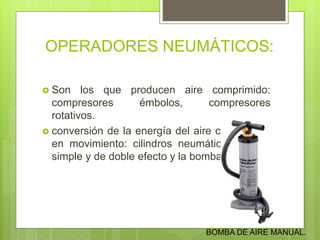
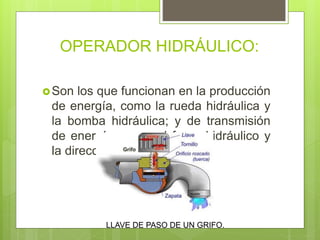
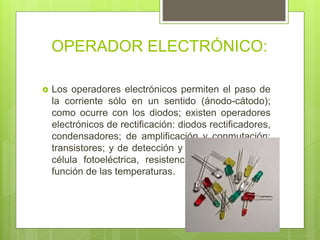
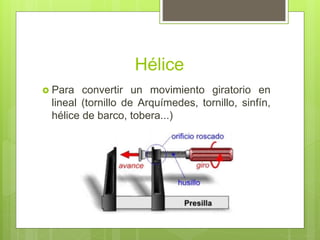
El documento resume diferentes tipos de conectores y operadores tecnológicos, incluyendo conectores de video analógico como S-Video, video por componentes y VGA, así como conectores de audio y video como video compuesto, SCART y coaxial RF. También describe operadores mecánicos, eléctricos, neumáticos, hidráulicos y electrónicos, así como máquinas simples como el plano inclinado, hélice, cuña y sus usos.