Ieee espol. mac_itex
•
0 recomendaciones•71 vistas

Este documento describe un sistema mejorado de control de compresores de tornillo para optimizar el consumo eléctrico en una planta. Actualmente, los dos compresores operan en modo de carga y descarga frecuentemente debido a las variaciones en la demanda de aire comprimido. El objetivo es diseñar un controlador que estabilice la presión de salida para reducir fluctuaciones y mejorar la eficiencia mediante el análisis dinámico del sistema de aire comprimido en SIMULINK/MATLAB.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (19)
Similar a Ieee espol. mac_itex
Similar a Ieee espol. mac_itex (20)
Más de Carlos Molina
Último
Último (20)
Ieee espol. mac_itex
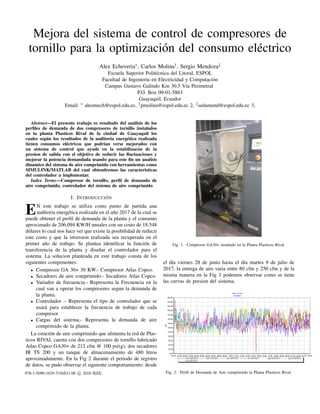
- 1. Mejora del sistema de control de compresores de tornillo para la optimizaci´on del consumo el´ectrico Alex Echeveria∗, Carlos Molina†, Sergio Mendoza‡ Escuela Superior Polit´ecnica del Litoral, ESPOL Facultad de Ingenier´ıa en Electricidad y Computaci´on Campus Gustavo Galindo Km 30.5 V´ıa Perimetral P.O. Box 09-01-5863 Guayaquil, Ecuador Email: ∗ aleomech@espol.edu.ec, †pmolina@espol.edu.ec 2, ‡sedamend@espol.edu.ec 3, Abstract—El presente trabajo es resultado del an´alisis de los perfiles de demanda de dos compresores de tornillo instalados en la planta Plasticos Rival de la ciudad de Guayaquil los cuales seg´un los resultados de la auditoria energ´etica realizada tienen consumos el´ectricos que podrian verse mejorados con un sistema de control que ayude en la estabilizac´on de la presion de salida con el objetivo de reducir las fluctuaciones y mejorar la potencia demandada usando para este fin un analisis dinamico del sistema de aire comprimido con herramientas como SIMULINK/MATLAB del cual obtendremos las caracteristicas del controlador a implementar. Index Terms—Compresor de tornillo, perfil de demanda de aire comprimido, controlador del sistema de aire comprimido I. INTRODUCCI ´ON EN este trabajo se utiliza como punto de partida una auditoria energ´etica realizada en el a˜no 2017 de la cual se puede obtener el perfil de demanda de la planta y el consumo aproximado de 206.094 KW/H anuales con un costo de 18.548 d´olares lo cual nos hace ver que existe la posibilidad de reducir este costo y que la inversion realizada sea recuperada en el primer a˜no de trabajo. Se plantea identificar la funci´on de transferencia de la planta y dise˜nar el controlador para el sistema. La solucion planteada en este trabajo consta de los siguientes componentes: • Compresor GA 30+ 30 KW.- Compresor Atlas Copco. • Secadores de aire comprimido.- Secadores Atlas Copco. • Variador de frecuencia.- Representa la Frecuencia en la cual van a operar los compresores segun la demanda de la planta. • Controlador .- Representa el tipo de controlador que se usar´a para establecer la frecuencia de trabajo de cada compresor • Cargas del sistema.- Representa la demanda de aire comprimido de la planta. La estaci´on de aire comprimido que alimenta la red de Plas- ticos RIVAL cuenta con dos compresores de tornillo lubricado Atlas Copco GA30+ de 212 cfm @ 100 psi(g), dos secadores IR TS 200 y un tanque de almacenamiento de 480 litros aproximadamente. En la Fig 2 durante el periodo de registro de datos, se pudo observar el siguiente comportamiento: desde Fig. 1. Compresor GA30+ instalado en la Planta Plasticos Rival. el d´ıa viernes 28 de junio hasta el d´ıa martes 9 de julio de 2017, la entrega de aire varia entre 80 cfm y 250 cfm y de la misma manera en la Fig 3 podemos observar como se tiene las curvas de presion del sistema. Fig. 2. Perfil de Demanda de Aire comprimido la Planta Plasticos Rival.978-1-5090-1629-7/16/$31.00 c 2016 IEEE
- 2. Fig. 3. Perfil de Presion de Aire comprimido la Planta Plasticos Rival. Del perfil de demanda obtenido en el estudio y del perfil de presion se puede concluir lo siguiente: • Los CFM demandados por la planta tiene variaciones que hacen que los compresores trabajen en carga y descarga de manera frecuente. • La presion de salida de los compresores presenta caidas durante el trabajo de los compresores. • Se puede evidenciar que el tiempo de arranque del motor es muy corto. Fig. 4. Grafico de carga y descarga de compresor. El metodo de arranque y paro del motor del compresor es por medio de un arranque estrella triangulo Fig 5, el cual tiene las siguientes desventajas con respecto al arranque por medio de un variador de velocidad: • Presenta un consumo elevado de energ´ıa y un desgaste en el momento de arranque/parada. • La corriente de arranque puede ir entre 1.3 a 2.6 veces la intensidad nominal del motor. • El cambio que hace este tipo de arranque generan corri- entes da˜ninas y transcientes de torque. Tomando lo anteriormente mencionado en este nuevo desar- rollo se aprovechara la oportunidad del cambio de tecnologia para la optimizacion del sistema de control de arranque de los compresores y se instalara un variador de frecuencia con el objetivo de alargar el tiempo de vida del motor del compresor asi tambien como poder tener un control sobre la frecuencia de trabajo de cada compresor. Entre mayor sea la demanda de energ´ıa en un momento dado por un per´ıodo de 15 minutos, m´as alto ser´a tambi´en el cargo por demanda. Entre m´as uniformemente se pueda repartir el consumo de energ´ıa el´ectrica en una planta, m´as bajo ser´a el cargo por demanda. El problema radica en que el arranque y el paro es simultneo, haciendo que se tenga un consumo de energa elctrica innecesario ya que en ocasiones no es necesario el uso de los dos compresores, puesto que uno puede abastecer la demanda requerida hasta que por la demanda de la planta se requiera que arranque el segundo compresor. Fig. 5. Arranque estrella-triangulo de compresos GA30+. De lo planteado anteriormente podemos deducir que el motor del compresor al trabajar en carga/descarga mantiene la velocidad constante en cualquiera de los dos estados por lo que el motor se mantendra consumiendo potencia electrica innecesariamente. La pregunta que motiva este trabajo es ¿Un controlador PID ser´a capaz de lograr que se pueda llegar a tener un lazo de control ms estable y que a la vez ayude a llevar a la variable mucho ms rpido al setpoint deseado? en la Fig 6 se plantea un esquema del modelo que se usara para mejorar el sistema de control. Fig. 6. Modelo de Control Planteado.
- 3. Este documento consta de ocho secciones incluyendo la introducci´on como n´umero 1, la secci´on 2 muestra la revisi´on bibliogr´afica en la que se citan los m´etodos de dise˜no, para luego enfocarnos en el desarrollo de un controlador que permita cumplir con las especificaciones planteadas en la pregunta del p´arrafo anterior y hacer la discusi´on y an´alisis de la respuesta de velocidad del motor ante cambios en la presion de referencia y perturbaciones en las cargas del sistema obtenida con el controlador y la planta, esto se presenta en las secciones 3, 4 y 5. Finalmente, las conclusiones en la secci´on 6 seguida de los agradecimientos en la secci´on 7, y las referencias bibliogr´aficas en la secci´on 8. II. M´ETODOS DE DISE ˜NO En la teor´ıa de sistemas de control moderno encontramos varios m´etodos para el dise˜no de controladores como el m´etodo del lugar geom´etrico de las ra´ıces, el m´etodo de la respuesta de frecuencia y el m´etodo de an´alisis en el dominio del tiempo con variables de estado. El m´etodo del lugar geom´etrico de las ra´ıces es un m´etodo gr´afico con el que se dibuja la posici´on deseada de las ra´ıces en el plano ”s” de acuerdo a los requerimiento de dise˜no, en este m´etodo se utiliza la funci´on de transferencia para convertir las ecuaciones diferenciales que representan el sistema en ecuaciones algebraicas en t´erminos de la variable compleja ”s”. El m´etodo de la respuesta en el domino de la frecuencia w, donde la respuesta de frecuencia de un sistema se define como la respuesta del sistema en el estado estacionario a una se˜nal sinusoidal de entrada. Las ventajas relevantes de este m´etodo son: la f´acil disponibilidad de se˜nales sinusoidales de prueba, la posibilidad de obtener la funci´on de transferencia que describe el comportamiento sinusoidal del sistema en estado estacionario, y el v´ınculo entre los dominios del tiempo y la frecuencia. El an´alisis en los m´etodos anteriores est´a limitado a una entrada y una salida y aplicable ´unicamente para sistemas lineales, sin embargo, los sistemas por lo general son sensibles a m´ultiples entradas y presentan m´ultiples salidas por lo que se requiere un m´etodo que resuelva estas limitaciones, y ese m´etodo es el an´alisis en el dominio del tiempo. Un sistema de control que var´ıa en el tiempo es un sistema en el que uno o m´as de sus par´ametros pueden variar en funci´on del tiempo [2]. III. METODOLOG´IA La metodolog´ıa utilizada se bas´o en procesos experimen- tales con la finalidad de desarrollar el controlador de un generador siguiendo los pasos mostrados en el diagrama de flujo de la Fig. 7, teniendo como primicia que el variador de frecuencia opera a un valor estable de 60 Hz, haciendo que el motor de inducci´on trabaje a su velocidad nominal que es 1590 RPM. Fig. 7. Diagrama de flujo de la metodolog´ıa utilizada. A. Curva Caracter´ıstica y punto de operaci´on El punto de partida es la obtenci´on de la curva caracter´ıstica del sistema por medio de la toma de datos de manera experimental, que consiste en aplicar diferentes valores de voltaje al bobinado de campo del generador y medir el voltaje generado en los terminales de salida DC. Las herramientas a utilizar en este proceso son: el software Matlab para crear la interf´az, un servidor OPC y un m´odulo cFP (Compact Field Point). Con los valores de voltaje aplicado al campo y el voltaje en los terminales de salida DC del generador se grafica la curva caracter´ıstica del sistema o tambi´en llamada curva de operaci´on, la cual se muestra m´as adelante en la secci´on de resultados. El criterio usado para determinar el punto de operaci´on del sistema se basa en tomar un punto donde la curva caracter´ıstica tenga un comportamiento lineal, es decir, donde la pendiente no cambia de valor.
- 4. B. Identificaci´on Para la identificaci´on del sistema se hace trabajar a la planta en el punto de operaci´on y ralizando peque˜nos cambios en el voltaje de campo del generador se registra el comportamiento del voltaje generado, con el registro de los valores de voltaje de campo y generado se utiliza la herramienta IDENT de Matlab con la cual se obtiene la funci´on de transferencia. Esta herramienta encuentra un modelo cuya respuesta a la entrada dada se asemeja a la salida real de la planta, para nosotros es deseable que el porcentaje de aproximaci´on entre la respuesta del modelo y la respuesta del sistema sea mayor al 85% para considerar al modelo como v´alido. C. Especificaciones de funcionamiento Como especificaciones o requerimientos de funcionamiento, establecimos que el sistema tenga un error de estado esta- cionario de Ess = 0, un tiempo de estabilizaci´on de Tss < 0.5 y un sobrenivel porcentual de SP < 5% frente a una entrada de tipo escal´on. Estas especificaciones fueron escogidas en base a la experiencia de los autores. D. Dise˜no del controlador Con la funci´on de transferencia G(s) obtenida mediante la identificaci´on y las especificaciones de dise˜no se procede a determinar el controlador Gc(s) mediante el m´etodo del lugar geom´etrico de las ra´ıces, el sistema de lazo cerrado se muestra en la Fig. 8. Fig. 8. Diagrama de bloques para el dise˜no del sistema realimentado. E. Implementaci´on del controlador Para la implementaci´on del controlador se hace uso del software Matlab con las herramientas de Simulink y las herramientas para el servidor OPC que permiten la lectura y escritura en el cFP. IV. RESULTADOS Aplicando el procedimiento para determinar la curva car- acter´ıstica de operaci´on de la planta, nos di´o como resultado una serie puntos los cuales permiten construir la curva que se muestra en la Fig. 9. La Fig. 9 muestra el voltaje generado por el generador para valores de voltaje entre 0 y 2.2 voltios aplicados en el bobinado de campo. El punto de operaci´on que se seleccion´o en base a la Fig. 9, es 5.7 voltios como voltaje de salida del generador y 1.5 voltios como voltaje aplicado al campo, se consider que la curva caracter´ıstica al rededor de dicho punto tiene un Fig. 9. Curva caracter´ıstica de operaci´on de la planta. comportamiento lineal. Aplicando la metodolog´ıa para la identificaci´on de sistemas con IDENT de Matlab se obtuvo el modelo con la funci´on de transferencia de la ecuaci´on 1 con un porcentaje de ajuste de 96 % G(s) = 63670 (s + 133.9)(s + 134) . (1) Para cumplir con los requerimientos de la pregunta planteada ¿Un controlador PID ser´a capaz de lograr que el voltaje en los terminales de salida del generador tenga un sobrenivel porcentual de 5 % respecto del voltaje de referencia con un tiempo de estabilizaci´on de 0.5 segundos y un error de estado estable de 0 % frente a una entrada de tipo escal´on? Se determin´o el controlador que se muestra en la ecuaci´on 2, Gc(s) = 2 s . (2) El diagrama de bloque desarrollado en Matlab es el que se muestra en la Fig. 10. Fig. 10. Diagrama de bloque en Matlab. La Fig. 10 muestra la interfaz que contiene los switches de encedido, marcha y parada, muestra el controlador Gc(s) y el rect´angulo con el Subsystem que contiene las herramientas del servidor OPC para manejar las entradas y salidas del cFP. El modelo con el controlador de la ecuaci´on 2 tiene la respuesta de voltaje DC de salida del generador con un
- 5. sobrenivel porcentual de 0% y un tiempo de estabilizaci´on de 0.5 segundos. Ver Fig. 11. Fig. 11. Respuesta simulada del modelo sistema frente a una entrada escal´on unitario. La Fig. 11 muestra la respuesta simulada del sistema cuando la referencia cambia con la forma de la funci´on escal´on unitario. La comparaci´on del voltaje de referencia con el voltaje de salida del generador se muestra en la Fig. 12. Fig. 12. Respuesta del sistema frente a cambios en la referencia. La se˜nal de color celeste en la Fig. 12 representa el voltaje de referencia y la se˜nal de color naranja muestra el voltaje generado por el generador. La funci´on de una planta de generaci´on es alimentar cargas que pueden variar su valor en el tiempo, la Fig. 13 muestra la respuesta del sistema aplicando carga y adicionalmente se disminuye la velocidad del motor. Ambas perturbaciones se traducen en la ca´ıda del voltaje generado que luego por efecto del controlador se recupera cumpliendo con los pa´ametros de dise˜no. En Fig. 13 se muestra que el sistema parte desde cero, en el primer segundo llega a su punto operaci´on, luego al tiempo 5 s se presenta un cambio en el voltaje de referencia, Fig. 13. Respuesta del sistema frente a cambios en la carga y en la frecuencia. al tiempo 7.5 s se presenta la perturbaci´on en la carga que dura aproximadamente 5 s, al tiempo 12.13 s se presenta la perturbaci´on en la frecuencia que dura aproximadamente 1.8 s y fimalmente al tiempo 17 s se realiza la perturbaci´on en la carga y la frecuencia notando que el voltaje generado sigue al voltaje de refencia cumpliendo los par´ametros establecidos en el dise˜no. V. DISCUSI ´ON La planta desde su dise˜no fue concebida para operar con un controlador multivariable dise˜nado con el m´etodo de variables de estado, sin embargo, nos surgi´o la inquietud de si ¿Un controlador PID ser´a capaz de lograr que el voltaje en los terminales de salida del generador tenga un sobrenivel porcentual de 5 % respecto del voltaje de referencia con un tiempo de estabilizaci´on de 0.5 segundos y un error de estado estable de 0 % frente a una entrada de tipo escal´on? Inicialmente el objetivo era dise˜nar un controlador PID, pero de acuerdo a los resultados de la secci´on anterior se sugiere que con un control integral el sistema es capaz de responder satisfactoriamente y cumplir con los requerimientos de dise˜no planteados. Queda por determinar que afectaci´on provoca agregar el controlador proporcional y el control derivativo o de tendencias a la respuesta en r´egime transitorio y de estado estable. El alcance de este trabajo se limita encontrar un controlador para el voltaje generado, teniendo como variable de entrada el voltaje de campo del generador y como variable de salida el voltaje generado, asumiendo que el sistema es de una entrada y una salida, sin embargo este sistema es de m´ultiples entradas y m´utiples salidas. Por ejemplo, si aumentamos la referencia para el voltaje de salida del generador, implicar´a que aumente el torque de carga del motor y como para este sistema no se tiene un controlador para la velocidad del motor, consideramos que la velocidad disminuir´a su valor, afectando el voltaje generado por el generador. Este ejemplo nos sugiere que el controlador dise˜nado no es la mejor alternativa para el control del sistema. De la Fig. 13 notamos que la se˜nal del voltaje generado se aleja m´as de la se˜nal del voltaje de referencia cuando se presentan perturbaciones en la frecuencia en comparaci´on con los cambios que se presentan cuando aparece pertubaciones en
- 6. la carga, lo que nos sugiere hacer estudio de sensitividad con- siderando ya al sistema como de m´ultiples entradas y m´ultiples salidas, para lo cual pensamos que puede ser neceasario hacer adecuaciones a la planta de tal forma que se puenda incorporar equipos de medicin. VI. CONCLUSIONES Nosotros sugerimos que un controlador PID si es capaz de lograr que el voltaje en los terminales de salida del generador tenga un sobrenivel porcentual menor al 5 % respecto del voltaje de referencia con un tiempo de estabilizaci´on de 0.5 segundos y un error de estado estable de 0 % frente a una entrada de tipo escal´on, sin embargo no fue necesario implementar la parte proporcional ni la parte derivativa para culplir con los requerimiento de dise˜no, puesto que la parte integral del PID por si sola los puede cumplir. VII. AGRADECIMIENTOS Queremos expresar un agradecimiento profundo a Dios por regalarnos el don de la ciencia, a la ESPOL por facilitarnos el Laboratorio de Control Autom´atico y al profesor Javier Urquizo por su motivaci´on y tutor´ıa. REFERENCES [1] J. J. A. Veloz, “Construcci´on de un sistema de control de frecuencia- voltaje para un sistema de generaci´on el´ectrica a escala para el laboratorio de control autom´atico,” Escuela Superior Polit´ecnica del Litoral, Tech. Rep., 2013. [2] R. C. Dorf, Sistemas Modernos de Control Teor´ıa y Pr´actica. Addison- Wesley Iberoamericana, S.A., 1989.