Descargado 13 veces



![b) Modificando las opciones del Solver, resuelva el problema con el Método de Euler
utilizando pasos de 10−2
, 10−3
y 10−4
. ¿Pierde estabilidad la máquina? (Estable: el
ángulo de carga se mantiene bajo 90° a largo plazo). Comente.
Paso de 10−2
0 1 2 3 4 5 6 7 8 9 10
-5
0
5
10
x 10
4
Ángulo de carga delta
tiempo [s]
Ángulo°
0 1 2 3 4 5 6 7 8 9 10
200
400
600
800
Velocidad de la máquina w
tiempo [s]
velocidadangular[rad/s]](https://image.slidesharecdn.com/informe7-140701122435-phpapp01/85/Simulacion-en-Ing-Electrica-Ecuaciones-diferenciales-5-320.jpg)
![ Paso de 10−3
0 1 2 3 4 5 6 7 8 9 10
-50
0
50
100
Ángulo de carga delta
tiempo [s]
Ángulo°
0 1 2 3 4 5 6 7 8 9 10
300
310
320
330
Velocidad de la máquina w
tiempo [s]
velocidadangular[rad/s]](https://image.slidesharecdn.com/informe7-140701122435-phpapp01/85/Simulacion-en-Ing-Electrica-Ecuaciones-diferenciales-6-320.jpg)
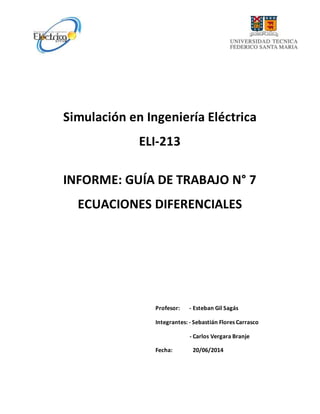
![ Paso de 10−4
De acuerdo a los 3 pasos usados anteriormente, se observa que para un paso grande de
10−2
por el método de Euler, la máquina no es estable, ya que supera los 90° de ángulo de
carga 𝛿. Lo mismo se observa para la velocidad de la máquina 𝜔, pegándose un salto a los
3 segundos aproximadamente.
Disminuyendo el tamaño del paso, se aprecia que la máquina es estable para Euler con
paso 10−3
llegando a un ángulo de carga de 60° aproximadamente, aunque se observa
que no es su ángulo estacionario, ya que sigue creciendo, lo mismo pasa con la velocidad
de la máquina, donde se ve un aumento continuo en el tiempo.
Para el paso más pequeño del análisis (10−4
), se alcanza la estacionalidad del ángulo de
carga, siendo un poco más de 30° su ángulo máximo y una velocidad de la máquina de
318 [𝑟𝑎𝑑/𝑠].
0 1 2 3 4 5 6 7 8 9 10
-20
0
20
40
Ángulo de carga delta
tiempo [s]
Ángulo°
0 1 2 3 4 5 6 7 8 9 10
305
310
315
320
Velocidad de la máquina w
tiempo [s]
velocidadangular[rad/s]](https://image.slidesharecdn.com/informe7-140701122435-phpapp01/85/Simulacion-en-Ing-Electrica-Ecuaciones-diferenciales-7-320.jpg)
![Como observación, en los tres casos el ángulo de carga y la velocidad de la máquina
después de la falla (a los 0.1 segundos, donde se aprecia el cambio de la excitación 𝑃𝑒 en
la velocidad de la máquina) mantienen un comportamiento oscilante sinusoidal, ya que la
ecuación diferencial no está amortiguada de ninguna forma, es por eso que se descartan
los casos en los cuales el paso es de 10−2
y 10−3
.
Comparando por el uso de pasos, se aprecia que a medida que el paso es menor, el
método converge, ya que si el paso es muy alto la intepretación puede ser errónea, como
es el caso del paso 10−2
que indicaba que la máquina es inestable, siendo que realmente
es estable.
c) Resuelva nuevamente el problema anterior pero utilizando el Método de Runge-
Kutta 4. ¿Qué diferencias observa con respecto a la resolución por Euler?
Paso de 10−2
0 1 2 3 4 5 6 7 8 9 10
-20
0
20
40
Ángulo de carga delta
tiempo [s]
Ángulo°
0 1 2 3 4 5 6 7 8 9 10
305
310
315
320
Velocidad de la máquina w
tiempo [s]
velocidadangular[rad/s]](https://image.slidesharecdn.com/informe7-140701122435-phpapp01/85/Simulacion-en-Ing-Electrica-Ecuaciones-diferenciales-8-320.jpg)
![ Paso de 10−3
0 1 2 3 4 5 6 7 8 9 10
-20
0
20
40
Ángulo de carga delta
tiempo [s]
Ángulo°
0 1 2 3 4 5 6 7 8 9 10
305
310
315
320
Velocidad de la máquina w
tiempo [s]
velocidadangular[rad/s]](https://image.slidesharecdn.com/informe7-140701122435-phpapp01/85/Simulacion-en-Ing-Electrica-Ecuaciones-diferenciales-9-320.jpg)
![ Paso de 10−4
A diferencia del método de Euler, el tamaño del paso no afecta mucho, ya que con un
tamaño de paso grande en Runge-Kutta 4 (10−2
) es de convergencia con tamaño de paso
más chico en Euler (10−4
).
Por eso se mantiene la estabilidad del sistema y la forma sinusoidal, dado que no hay
amortiguación alguna. También se mantienen los 318 [𝑟𝑎𝑑/𝑠] aproximados del caso
Euler.
En conclusión, en el método de Runge-Kutta no es necesario un tamaño de paso tan
pequeño como en Euler, por lo que computacionalmente sería más rápido de
implementar en sistemas más grandes o más complejos que puedan significar un retraso
mayor en el cálculo, por lo que este método es mejor.
0 1 2 3 4 5 6 7 8 9 10
-20
0
20
40
Ángulo de carga delta
tiempo [s]
Ángulo°
0 1 2 3 4 5 6 7 8 9 10
305
310
315
320
Velocidad de la máquina w
tiempo [s]
velocidadangular[rad/s]](https://image.slidesharecdn.com/informe7-140701122435-phpapp01/85/Simulacion-en-Ing-Electrica-Ecuaciones-diferenciales-10-320.jpg)

Este documento describe el análisis de la estabilidad transitoria de un generador síncrono de 100 MVA luego de una falla trifásica utilizando ecuaciones diferenciales y los métodos de Euler y Runge-Kutta. Se modela el sistema mediante ecuaciones que relacionan el ángulo de carga y la velocidad del rotor con la potencia mecánica y eléctrica. Se resuelve el modelo usando diferentes pasos y métodos, observando que Runge-Kutta es más estable y preciso que Euler.



























![Solucionario ecuaciones diferenciales dennis zill[7a edicion]](https://cdn.slidesharecdn.com/ss_thumbnails/solucionarioecuacionesdiferencialesdenniszill7aedicion-120713235939-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)










![Mtodo de runge..trabajo[1]... listo final](https://cdn.slidesharecdn.com/ss_thumbnails/mtododerunge-trabajo1-listofinal-110131140138-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![Presentac..[1]](https://cdn.slidesharecdn.com/ss_thumbnails/presentac-1-121123140522-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)














































