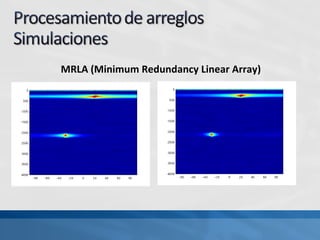
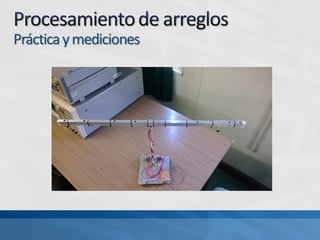
Este documento describe un proyecto de investigación sobre el procesamiento de señales de arreglos de sensores. El objetivo es estudiar algoritmos de procesamiento de arreglos para aplicarlos al procesamiento de señales de audio de banda ancha, simular el funcionamiento de un arreglo e implementar un micrófono direccional usando múltiples micrófonos omnidireccionales.