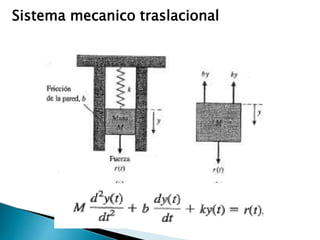
Este documento describe un sistema simplificado de suspensión de automóvil. Explica cómo modelar matemáticamente el movimiento vertical de la suspensión usando ecuaciones diferenciales. El objetivo es obtener la función de transferencia que relaciona el desplazamiento de entrada con el desplazamiento de salida.